

The SMART Interactive robotics platform is home to CEA-List and partner R&D projects on cobots, exoskeletons, and other collaborative robots. The state-of-the-art technologies available at the platform support the design of innovative, safe, high-performance solutions, with a particular focus on human-robot interaction and enhanced robotic functions.
The Saclay Manufacturing And Robotics Technology (SMART) platform is where CEA-List and its partners—academic institutions and companies—conduct R&D on:

Users come to SMART to develop breakthrough technologies in these fields and explore potential use cases. The platform’s equipment includes industrial robots, collaborative robots, cobots, inspection robots, exoskeletons, and autonomous mobile robots. Equipment manufacturers and end users work together to analyze and validate use cases in representative environments.
SMART addresses the manufacturing and other industries, as well as farming, construction, transportation, medicine, and more.
of facilities
experts
patents filed per year
SMART is home to a wide range of CEA-List technologies and know-how. Our partners come to SMART to design new software architectures to support the development of innovative robot manipulation techniques and to build exoskeletons and the associated control systems, for example. Existing robots’ control and perception systems can also be optimized at SMART.
The software environments available at SMART include:
One of the major challenges in the field of robotics is designing robots with powerful interaction capabilities that are also safe to operate. CEA-List is tackling robot safety head on, and through the SMART platform, has earned recognition as an expert in the field. We have developed rigid, lightweight, low-inertia actuators with very low friction, for example. These actuators allow very fine force control, dramatically improving safety for operators working in close proximity to robots.
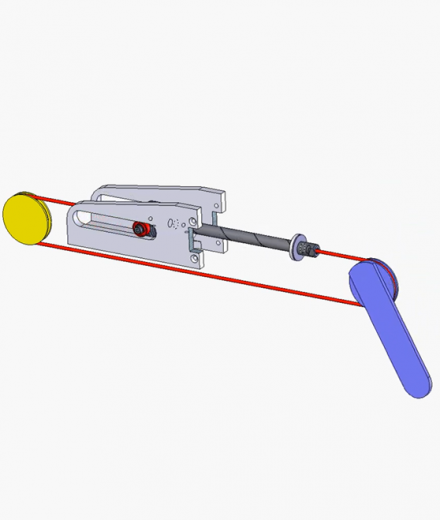
The cable and ball screw actuator, the result of many years of CEA research, is protected by several patents. It combines a high force multiplication factor and very low friction losses, making it ideal for lightweight, low-inertia robots designed to work with human operators. The actuator can estimate the force applied from measurements taken at the motor. No additional measurement sensors are needed.
SMART works with a wide range of partners.
Technology providers: Stäubli, Getinge La Calhène, ABB, UR, Isybot, Haption, CLEIA, COVAL, BA HealthCare, etc.
Corporate partners: Orano, Dassault Aviation, Safran, COLAS, Technip Energies, Stellantis, SADE, etc.

CEA-List’s companion robot demonstrator brings the institute’s early smart robotics research to life. The system can assemble, either independently or with the help of an operator, a set of around ten mechanical parts placed randomly in a bin. To complete the task, the system must coordinate several complex functions like planning, vision, grasping, assembly, and interaction with the human operator.
Learn more about our smart robotics research



