

CEA-List labs have been pursuing robotics research and development, with a particular focus on Computer-Aided Teleoperation (or CAT), since the 1970s.
CORTEX (Components-Oriented Real-Time EXecution engine), the latest generation of CEA-List’s robotic software framework, is the result of 30 years of robotics experience. CORTEX makes developing robot controllers faster and simpler.
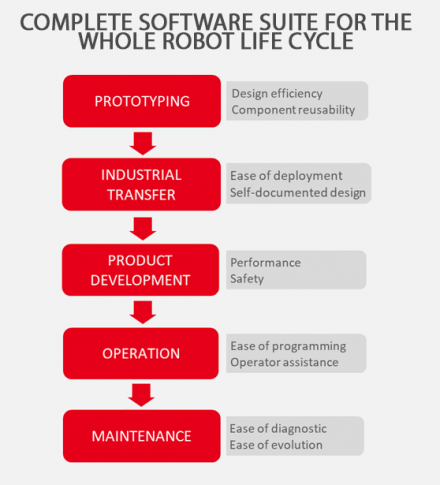
CORTEX is designed for both scientific research and industrial applications. It addresses the entire robotic system lifecycle, from prototyping and scaleup to operation and maintenance.
All aspects of the CORTEX suite have been designed to respond to three imperatives: modularity for increased flexibility, ergonomics for an optimal user experience, and reliability to ensure operating safety.
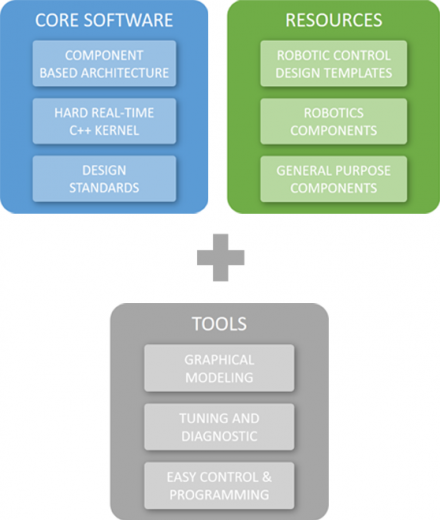
It includes:
The CORTEX suite can also be used to develop any kind of non-robotic physical system controller or data processing application.
CORTEX outpaces other state-of-the-art robotics frameworks (ROS/ROS2, OROCOS, RTMAPS, etc.) in several ways:
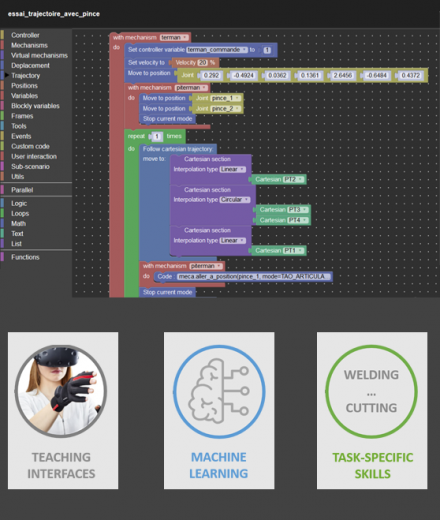
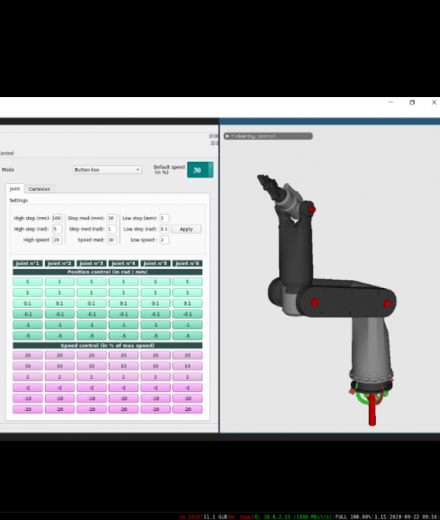
CORTEX currently provides a prototype of generic purpose GUI both for robot control (joint or Cartesian control, tele-operation…) and for system tuning and maintenance (parameters editing and recording). Its modular design allows for easy development of new widgets to address user-specific needs.
In the nuclear industry, remote handling is used to manipulate dangerous objects in hot cells and glove boxes, for example.
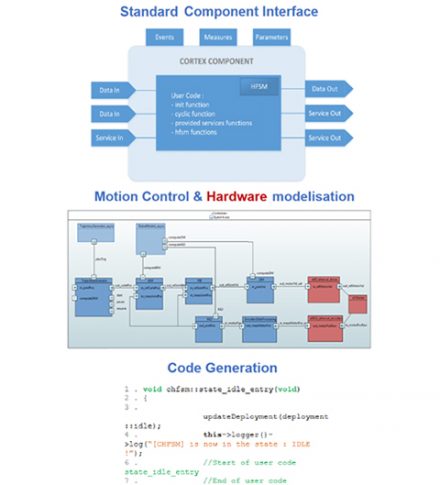
CORTEX facilitates the development of hard real-time controllers so that developers can rapidly integrate all the functions required for effective remote handling, covering all aspects of the tasks:



