

CEA-List built on its many years of research in teleoperation, cobots, and collaborative robotics to develop the SCORE environment. SCORE facilitates the development of robotic programming interfaces and supervised control systems, making it an ideal companion tool to CORTEX.
SCORE, or Supervisory COntrol framework for Robotic interfacE, is a software environment engineered by CEA-List robotics experts to facilitate the development of robotic programming interfaces and supervised control systems.
It’s a natural companion to the CORTEX controller development software suite.
SCORE was originally built to meet the control and supervision needs of robots that work in severe or hazardous environments. Since then, it has evolved into a tool well-suited to advanced manufacturing use cases, with innovative capabilities that significantly improve cobot and collaborative robot systems.

SCORE drastically improves any robotic system, be it a teleoperation, cobot, or collaborative robot system, by:
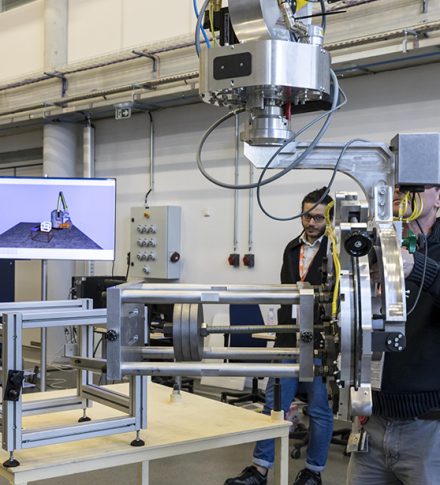
SCORE outpaces conventional robot programming approaches, which are based on off-line programming (OLP), by enabling continuous in-line interactive control via a digital twin synchronized in real-time with the physical robotic system.
The SCORE digital twin features:
The SCORE physical model is generated by the interactive multiphysics simulator XDE.
SCORE is in constant development. It integrates new, advanced in-line programming functionalities to respond to the ever-evolving needs of advanced manufacturing, guaranteeing more flexibility in the implementation and use of robotic systems and facilitating access to robotics by non-roboticists.

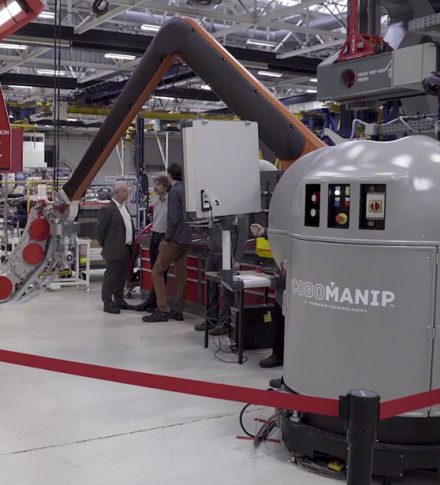
Assembling heavy equipment is a recurring problem in many industries. It is often done by hand, which is arduous and dangerous, or using cranes, which is complex and very time consuming.
Working with Cobomanip, a load-carrying cobot, SCORE can guide the user through assembly, especially when insertion tolerances are low. Anticollision zones can be programmed to allow SCORE to avoid damaging the part being installed or its surroundings, while virtual guides reduce the amount of degrees of freedom the user has to manage when orienting and precisely positioning the part in the work area.


