

CEA-List’s Interactive Robotics Department used CAT (computer-aided teleoperation) for its robotics development work for around 20 years. Today, CAT, a mature tool, is used in a variety of industrial use cases. However, it’s monolithic design makes functional upgrades difficult and expensive, especially for robotics use cases unrelated to teleoperation. The software is also hard to learn.
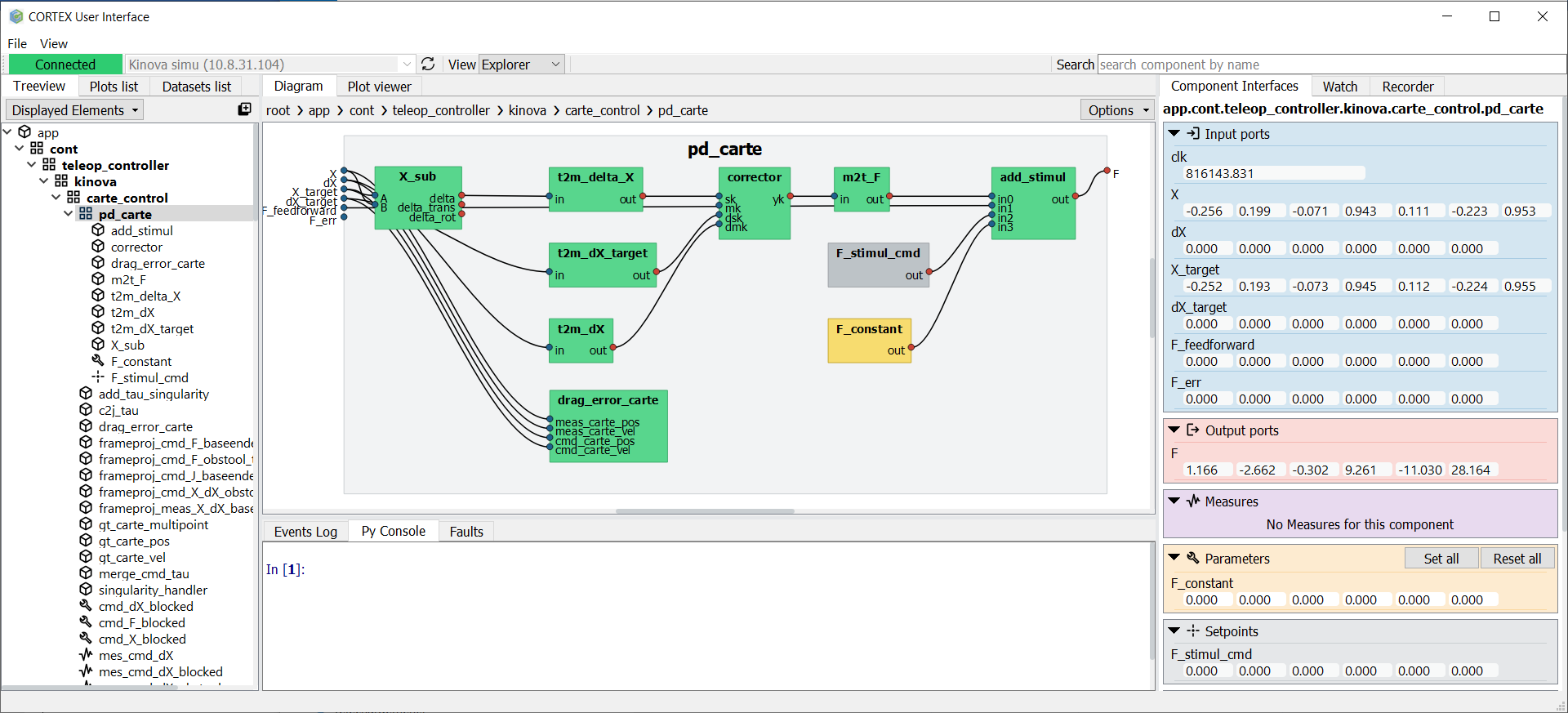
CORTEX «Component Oriented Real-Time EXecution engine» is completely different. Its generic-component-oriented design lets users build the robotic controller as a block diagram. This makes the software much easier to use and maintain. And, because it is also modular, components built can be reused in other use cases.
There are other component-based tools (such as OROCOS and RT-MAPS) on the market, but CORTEX offers several fundamental advantages that make it a better choice for industrial use cases. First, with features like containers (macro-components used to create multi-level diagrams) and mode management (separate block diagrams for each operating mode and real-time mode switching), CORTEX is much more effective at managing complexity. Second, CORTEX is an end-to-end software suite that offers all of the tools and features needed to develop, operate, and maintain robotic controllers.
CORTEX is also different from the popular ROS framework. ROS is middleware that connects robotic equipment with business software; CORTEX is used to build robust, high-performance real-time applications. In addition, CORTEX can interface with ROS, making it interoperable with a wide range of third-party tools.

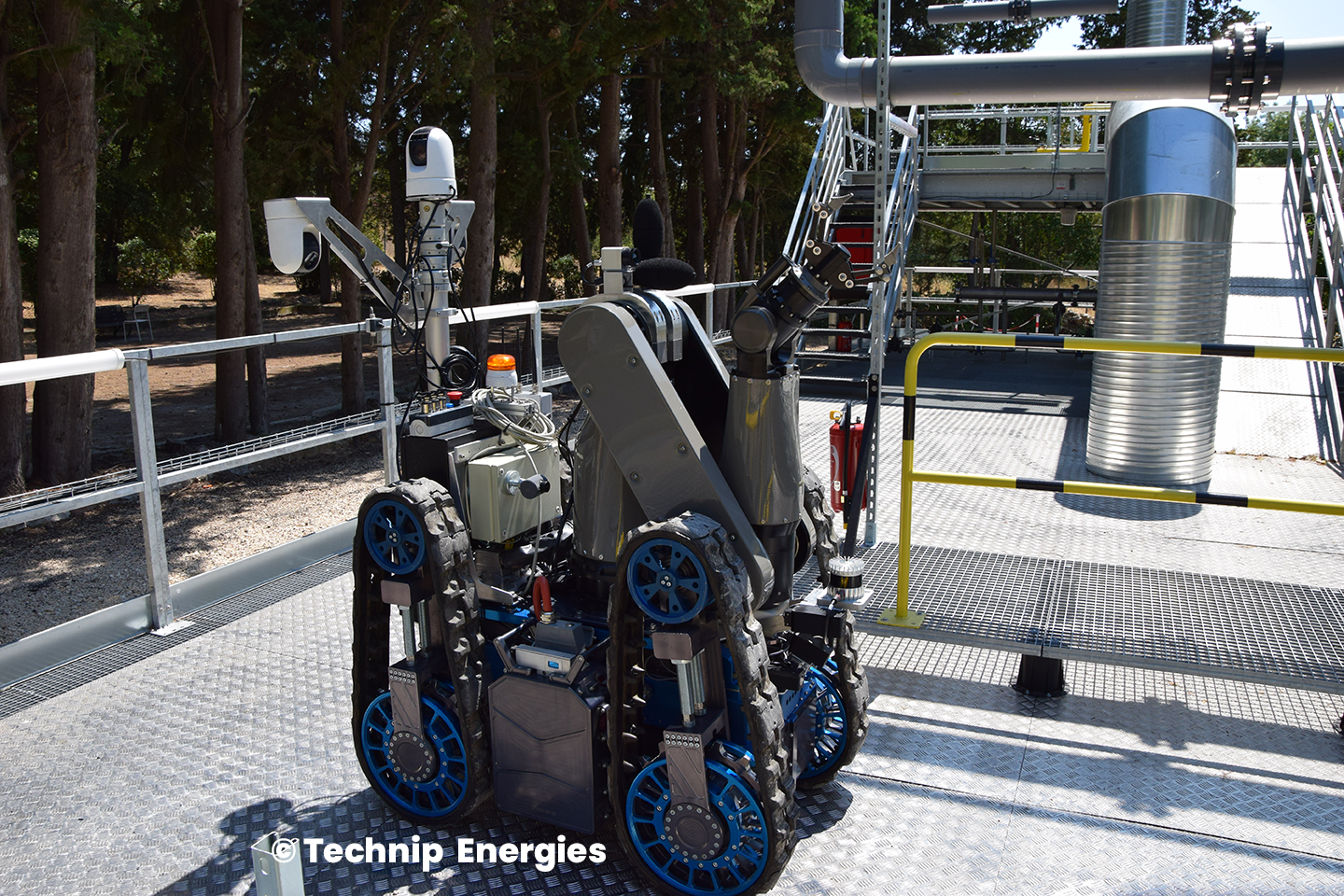
CORTEX is used in virtually all robotics use cases at CEA-List. It is currently being transferred to several CEA-List partners, including Orano (nuclear waste treatment), Kuka Systems (manufacturing), and Cybernetix, a Technip Energies company (inspection and maintenance). Projects with these partners have enabled us to scale CORTEX controllers up to TRLs of 7/8. These controllers have been tailored to the specific requirements of each use case and tested in real-world conditions.
CORTEX has been patented. The release of Version 1.0 is scheduled for early 2024, when the first license is sold.



