

When it comes to robotic grippers, the human hand has always been a source of inspiration. As late as the 2000s, however, dexterous manipulation capabilities in manufacturing settings were still limited to simple, repetitive tasks with little variation. It was only recently that the use of robotic grippers started to make inroads into a wider variety of tasks. New use cases—including complex tasks and tasks to assist human operators—once again brought the issue of dexterity to the forefront. The ability of a robotic gripper to manipulate objects with superior accuracy and sensitivity is a prerequisite to these high-dexterity tasks.
Abilis, developed by CEA-List as part of the European Tracebot project (Traceable Robotic Handling Of Sterile Medical Products, H2020-EU.2.1.1. Industrial Leadership program; grant agreement no. 101017089; 2021-2025), makes dexterous robotic manipulation a reality with advanced features including a sense of touch.
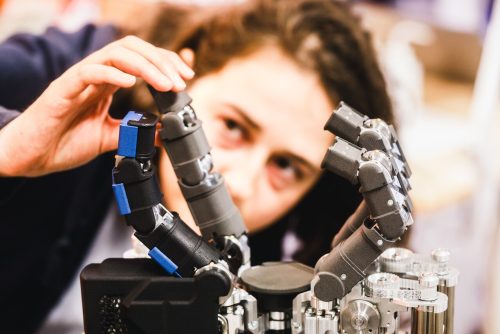
Here’s how it works: A total of fourteen actuators measure the force exerted on an object, while thirteen touch sensors (three for each of the four fingers and one on the palm) precision locate contact points. Built on a hybrid technology developed by CEA-Leti, the touch sensors feature a piezoresistive sensing layer. Integrated neural network algorithms trained to recognize a specific high-frequency signal give Abilis’ fingers the ability to determine when an event, like slippage, is critical.
Abilis is designed to be versatile: It adapts to objects of different shapes and sizes with no decrease in precision on small objects. And, with controlled force and dexterity, it also adapts naturally to new objects. Finally, using its palm and one or more fingers, Abilis can handle objects with high dexterity.
It is also uncommonly strong, with eighteen degrees of freedom and high clamping force (20 N) at the finger level. Objects weighing up to 2 kg can be lifted with a single finger.

The Tracebot project provided the initial use case for Abilis: the two-handed manipulation of sterile medical products—an industry where robotics could make production faster and cheaper while ensuring strict traceability.
These initial tests confirm the high potential for the gripper and two-handed robot cell. CEA-List intends to bring the technology to a higher TRL. Further development work will include: