

When it comes to the large-scale adoption of haptic devices and, especially, wearables like haptic gloves for virtual reality systems, selecting the right actuator is a major technological challenge. There is currently a lot of research attempting to find an alternative to the traditional bulky electric motors. Recent research has focused on pneumatic, electrostatic, and magnetorheological devices. One thing these devices all have in common is that they are passive actuators (i.e. brakes), with high energy density that enables powerful, yet compact systems. However, they can only work against the user’s movement. Nevertheless, in practice, this capability does address a large proportion of useful interactions.
CEA-List has been researching active lubrication for a decade, designing a complete integrated actuator that will open the door to a new kind of brake suitable for a wide range of applications.
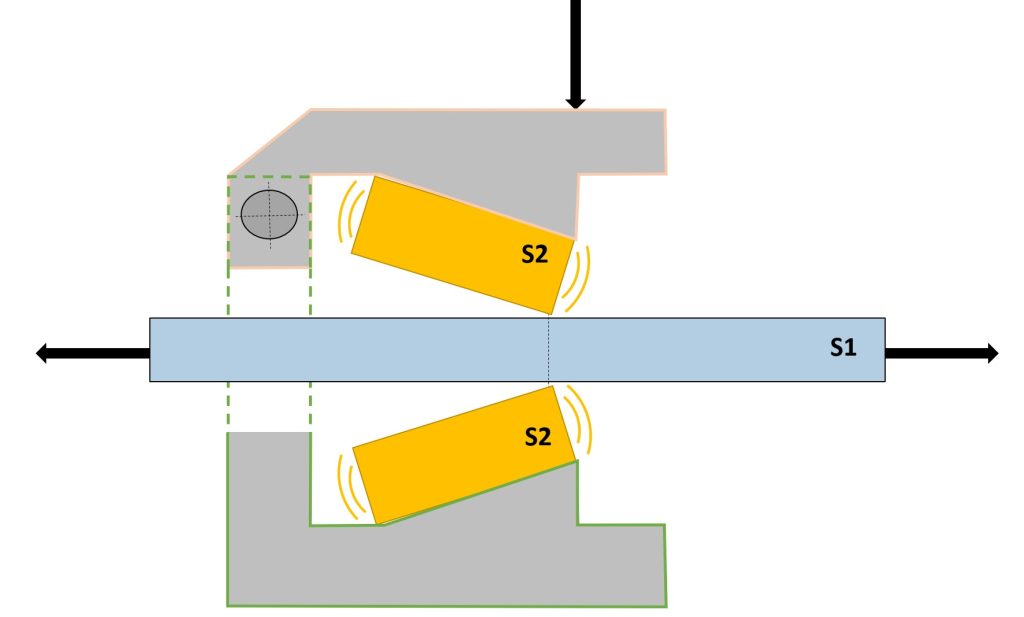
The principle is simple (Figure 1): A moving part, typically a glass plate, is sandwiched between two piezoelectric actuators. When the actuators are excited to their resonant frequency by an electrical signal, the part is released. The excitation signal’s amplitude can then be modulated—very rapidly, at up to 200 Hz or more—to control the force felt by the user moving the part. In this way, the actuator can render an effort from the kinesthetic to the tactile domain. It is also possible to decouple the two and independently control the force and texture felt.
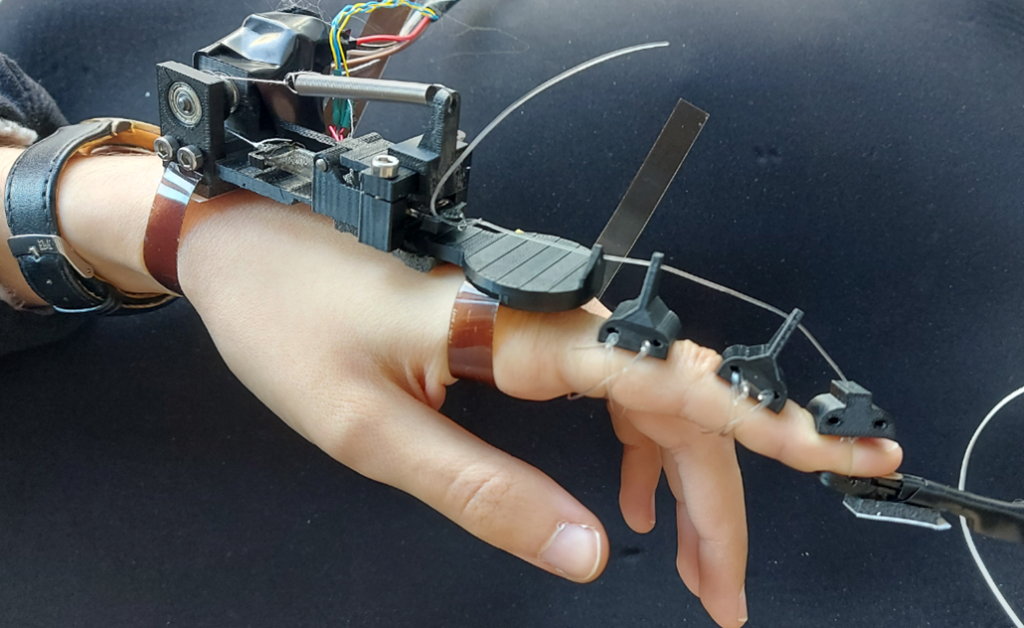
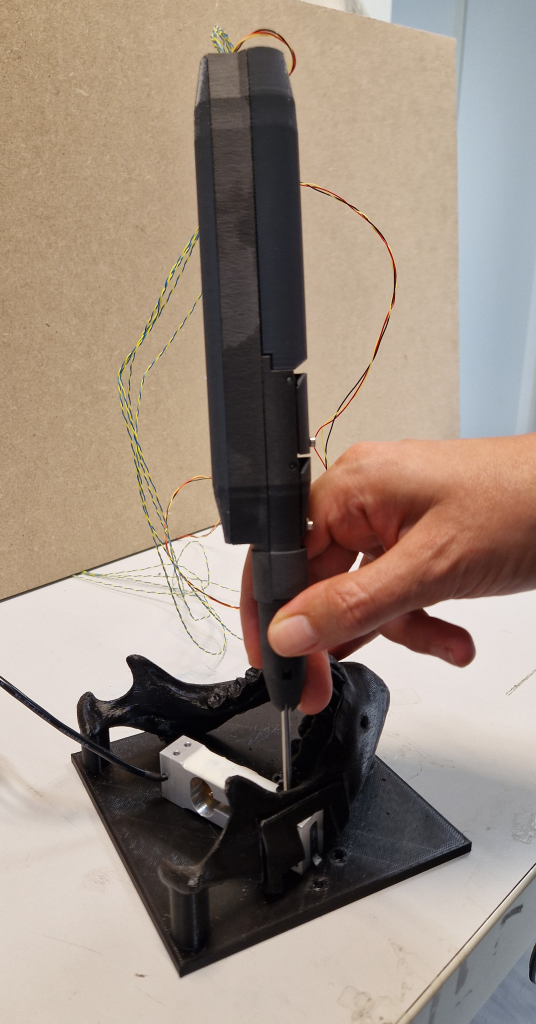
The design and study of this brake was the subject of Marion Pontreau’s PhD research as part of the ANR Wavy project. As a result of this research, friction force was reduced by more than 90%. This impressive improvement demonstrates the usefulness of this approach for haptic systems. The actuator developed was tested on various interfaces, including the Wavy haptic glove (see illustration), where it was used to render clamping forces and textures in a demonstration that won the Best Demo Award at IEEE VR 2025. The actuator was also used to design a surgical bone cutter for simulation-based osteotomy training (Figure 2). This research won the Best Student Paper award at World Haptics 2025.
90%: the typical reduction in friction forces with active lubrication.
Two patents have been filed, and a third is in the pipeline: