

In robotic gripping, the positions of the effectors (phalanges or fingertips) on an object must be controlled precisely. CEA-List looked at a practical case where the only information available was a 3D point cloud of the gripper, generated by visual sensors, simulations, or generative neural networks.
Read more
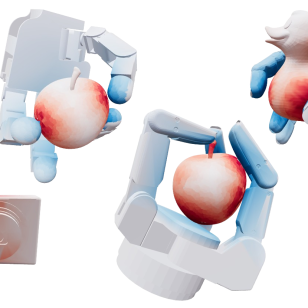
CEA-List developed a dexterous bimanual manipulation system : its multiple reconfigurable fingers are equipped with multimode perception capabilities. The system can carry out 80 different grips, using finely controlled force, and detect slippage.
Read more