


The IRT SystemX 3SA project produced a method and associated software for creating a database of autonomous vehicle safety test scenarios representative of a variety of environments and driving situations. The tool leverages three kinds of scenarios: real accidents, real road tests, and numerical simulations. According to the ISO 21448 standard for the safety of the intended functionality (SOTIF) of road vehicles, selecting random tests does not guarantee sufficient representativeness, and selecting the most common situations may overlook rare but dangerous scenarios.
Our strategy was to use an abstract model of the system at the logical scenario level to solve this problem. The scenarios are time sequences of driving scenes whose parameters are defined in a discrete state-space model. Here’s how it works: “Steady acceleration,” “low idle,” or “high idle” could all be discrete state-spaces for the “acceleration” parameter. These abstractions are digitalized and used to derive concrete test scenarios for simulation.
We developed a method and software for generating these logical scenarios. The abstract model is built using CEA-List’s Diversity software, factoring in the behavior of the vehicle and other road users. A symbolic execution algorithm then explores the model’s possible paths, generating a minimum set of abstract logical scenarios covering all possible real-life scenarios based on the initial situation.
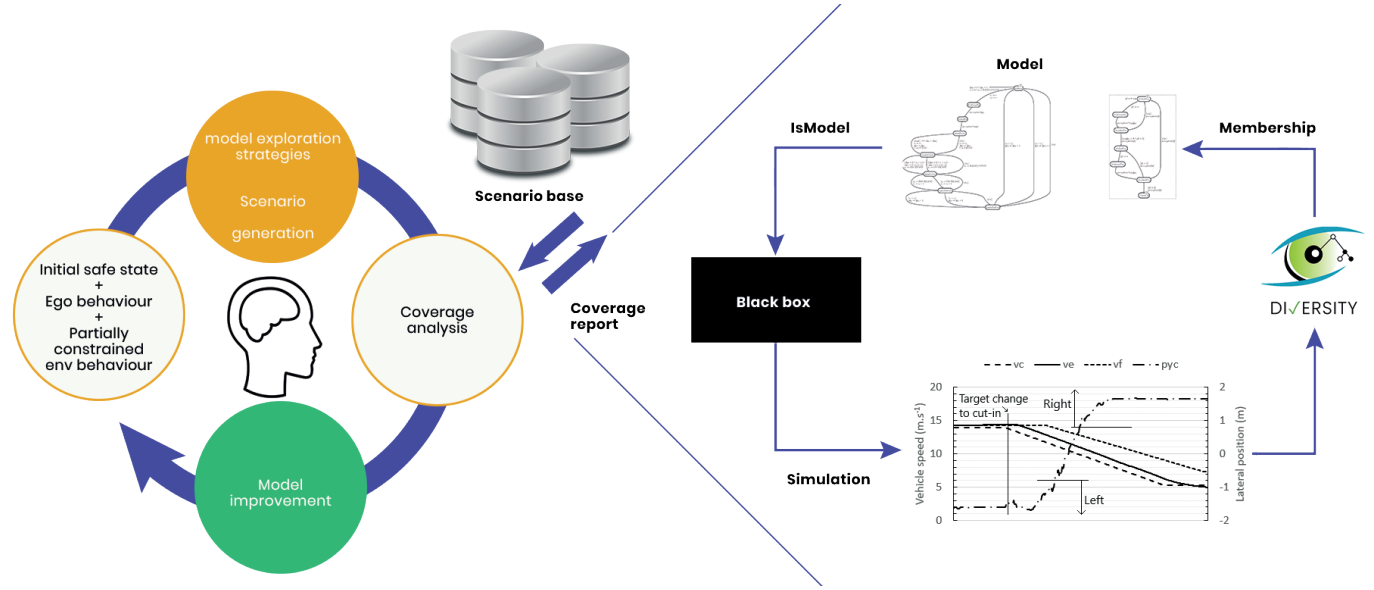
The model is compared with the simulation to ensure consistency. A time series of data simulating the real vehicle is abstracted and discretized, membership testing checks the correspondence with the abstracted model, and, finally, the abstracted model is refined to factor in deviations from the physical phenomena.
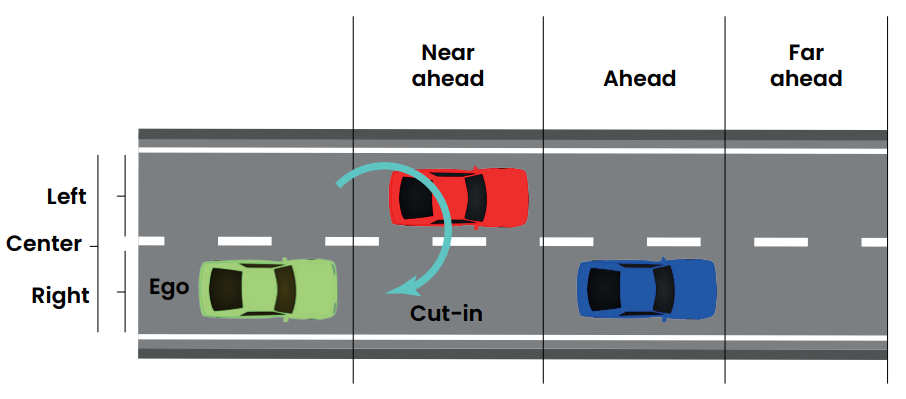
The method was used on a scenario involving a cut-in maneuver (a lane change where the vehicle merges into the adjacent lane at a short distance in front of another vehicle).
Our method leverages the system design model to generate abstract, representative test scenarios that also factor in the relevant standards.