La plateforme Robotique interactive SMART accueille les développements du CEA-List et de ses partenaires industriels sur les cobots, exosquelettes et autres robots collaboratifs. Elle propose un ensemble de technologies à l’état de l’art pour concevoir des solutions novatrices, sûres et performantes orientées sur les interactions entre humains et robots et sur l’amélioration des capacités de ces derniers.
La plateforme de robotique interactive SMART (Saclay Manufacturing And Robotics Technology Platform) accueille les développements menés par le CEA-List avec ses partenaires industriels et académiques autour des thèmes suivants :

Elle permet à ses utilisateurs de développer des technologies en rupture dans ces différents domaines et d’en explorer les applications potentielles. Ses équipements (robots industriels, robots d’inspection, exosquelettes, Autonomous Mobile Robots, etc.) et ses liens avec les équipementiers et les utilisateurs finaux rendent possible l’analyse et la validation des usages dans un environnement représentatif.
Smart s’adresse à tous les secteurs, de l’agriculture au monde industriel, en passant par le BTP, le transport, le domaine médical, etc.
de locaux
experts
brevets par an
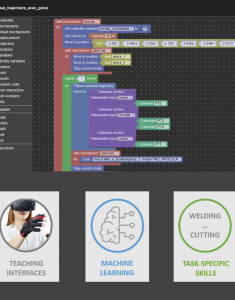
SMART met à disposition un ensemble d’expertises et de technologies développées au CEA-List. Les partenaires peuvent y faire appel pour concevoir de nouvelles architectures logicielles, destinées, notamment, à la conception de techniques innovantes de manipulation des robots ou à la construction et la commande d’exosquelettes. Ces technologies et expertises sont également mobilisables pour des études d’optimisation de la commande et de la perception de robots standards.
Parmi les environnements logiciels mis à disposition :
Un enjeu majeur de la robotique actuelle auquel le List porte une attention particulière est la conception de robots performants dans l’interaction et sûrs dans leur fonctionnement. Le CEA-List, à travers sa plateforme SMART, est reconnu pour son savoir-faire en la matière. Il s’appuie, notamment, sur la mise en œuvre d’actionneurs à très faible frottement associant rigidité, légèreté et faible inertie. Autorisant un contrôle très fin des efforts exercés, ils offrent ainsi un haut niveau de sécurité pour les opérateurs travaillant à proximité.
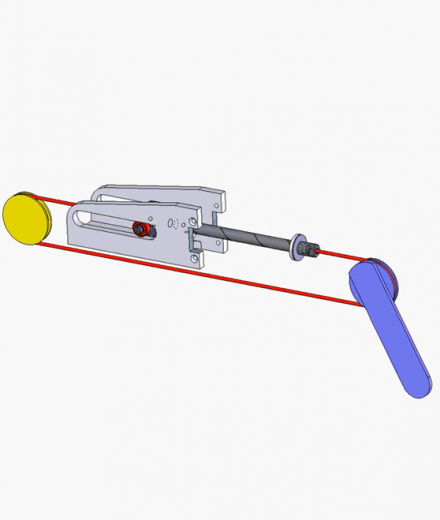
L’actionneur à câble et vis à billes est le fruit de nombreuses années de recherche au CEA. Couvert par plusieurs brevets, il présente des facteurs de démultiplication des efforts importants tout en maintenant les pertes à un niveau très faible. Ces performances permettent de concevoir des robots légers et à faible inertie, parfaitement compatibles avec la collaboration avec les opérateurs, notamment en estimant les efforts qui s’exercent en sortie de l’actionneur par des mesures au niveau du moteur, sans ajouter de capteur supplémentaire.
SMART compte un grand nombre de partenaires.
Fournisseurs de technologies : Stäubli, Getinge La Calhène, ABB, UR, Isybot, Haption, CLEIA, COVAL, BA HealthCare …
Partenaires industriels : Orano, Dassault Aviation, Safran, COLAS, Technip Energies, Stellantis, SADE…

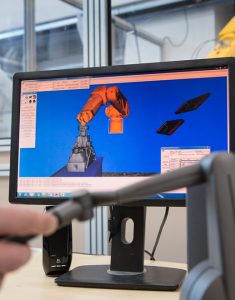
Le démonstrateur Robot Compagnon regroupe les travaux du CEA-List en robotique intelligente. Le système est capable d’assembler, en autonomie ou avec l’aide d’un opérateur, une dizaine de pièces mécaniques disposées aléatoirement dans un bac de dépose. Pour cela, il sait coordonner un ensemble de fonctions complexes comme la planification, la vision, la saisie et l’assemblage et l’interaction avec l’homme.
En savoir plus, consulter la page Axe de recherche Robotique intelligente