

Le CEA-List a développé une interface cognitive basée sur des ontologies pour offrir un outil de programmation contextuelle de robot sans compétences robotiques préalables.
Lire la suite
Appréhender un environnement inconnu en respectant des contraintes strictes de sécurité demeure un enjeu pour les robots. Et c’est le défi que nos équipes ont relevé dans le projet Magicoders, en combinant dans une nouvelle approche les forces de l’IA symbolique et de l’IA générative.
Lire la suite
À l’occasion du salon Pollutec à Lyon, du 7 au 10 octobre 2025, SADE, filiale dédiée au cycle de l’eau du groupe NGE, et le List, institut du CEA dédié aux systèmes numériques intelligents, annoncent le lancement de la solution TUBOCONTACT SD (Tubocontact small diameters).
Lire la suite
Retrouvez le CEA-List pour la 6ème édition du World Nuclear Exhibition, du 4 au 6 novembre 2025 au Parc des Expositions de Villepinte – Paris Nord | Stand H064.
Lire la suite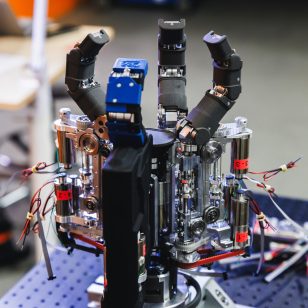
Le partenariat stratégique entre Tata Consultancy Services et le CEA-List vise à développer des solutions robotiques intelligentes pour des applications industrielles concrètes et à renforcer la compétitivité industrielle indo-européenne.
Lire la suite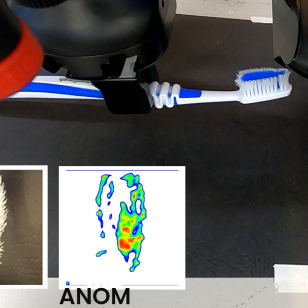
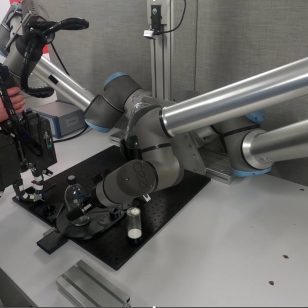
Les travaux menés par le CEA-List en collaboration avec Siemens visent à optimiser les étapes de manipulation robotique de pièces industrielles et leur contrôle visuel, en intégrant plusieurs technologies avancées de vision par ordinateur, pour réaliser des tâches complexes d’inspection en temps réel.
Lire la suite
Le CEA-List a développé un système de manipulation dextre bimanuelle. Ses doigts reconfigurables, dotés d’une perception multimodale, offrent 80 prises différentes avec une maîtrise fine des efforts, tout en détectant les glissements des objets.
Lire la suite
Le CEA-List a conçu un agent de manipulation robotique basé sur la vision artificielle et l’apprentissage profond, capable de réagir avec précision à une instruction de haut niveau en langage naturel correspondant à une tâche de saisie.
Lire la suite