Fruit de 30 ans d’expertise et développements des équipes robotiques du CEA-List, la suite logicielle CORTEX simplifie et accélère le développement de contrôleurs de robots.
Les équipes du CEA-List conduisent depuis les années 70 des recherches et développements dans le domaine de la robotique, notamment sur la Télé-opération Assistée par Ordinateur (ou TAO).
Dernière génération de plateforme TAO qui capitalise 30 années d’expertise et développements dans ce domaine, la suite logicielle CORTEX (Components-Oriented Real-Time EXecution engine) simplifie et accélère le développement de contrôleurs de robots.
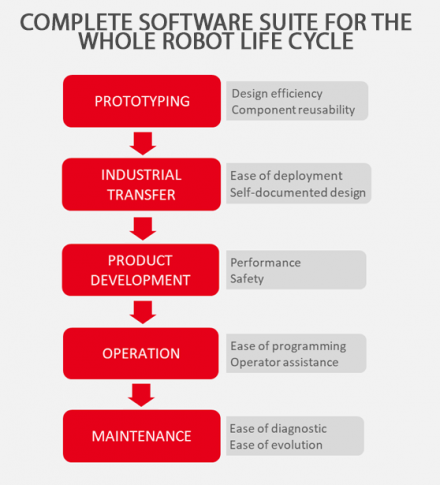
CORTEX répond à la fois aux besoins en recherche et aux besoins des industriels, et ce, pour toutes les phases du cycle de vie d’un système robotique : prototypage, industrialisation, exploitation, maintenance.
La solution logicielle a été entièrement conçue selon trois priorités majeures : être modulaire et flexible, offrir la meilleure ergonomie pour l’utilisateur, et garantir robustesse et sûreté de fonctionnement.
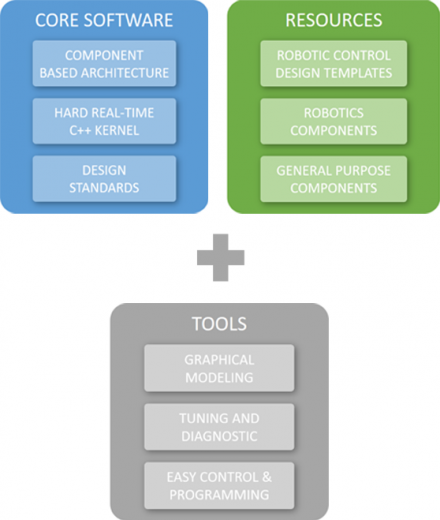
Elle comprend :
L’infrastructure (Core Software + Tools) de CORTEX est totalement générique et indépendante des notions robotiques. Cet environnement peut donc être utilisé pour développer tous types de contrôleurs de systèmes physiques ou d’applications scientifiques.
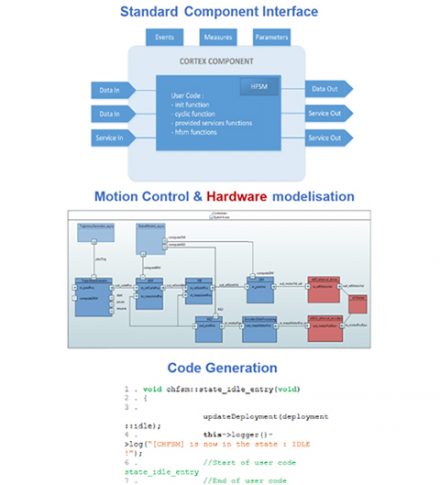
CORTEX se distingue d’autres frameworks robotiques de l’état de l’art (ROS/ROS2, OROCOS, RTMAPS, etc.) par :
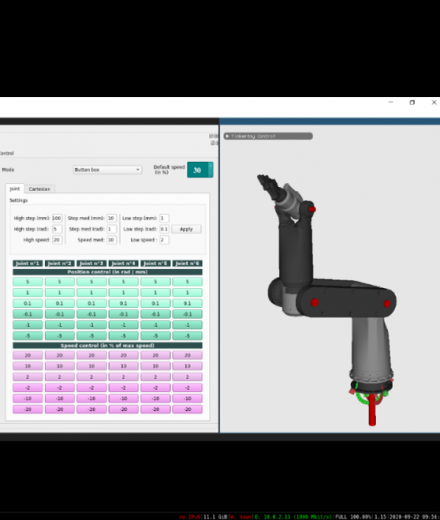
Développement très rapide d’un prototype d’Interface Graphique Utilisateur, pour piloter un bras robotique en articulaire, axe par axe, et en cartésien.
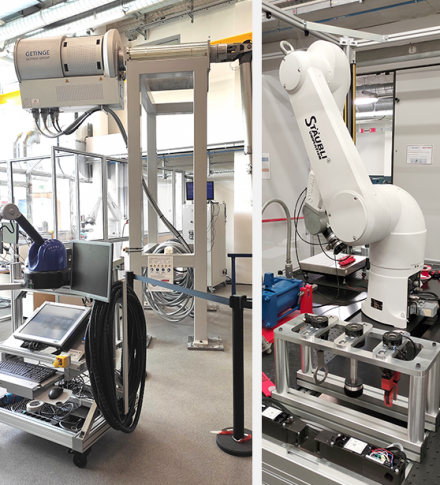
La télémanipulation joue un rôle essentiel pour la manipulation d’objets dangereux dans le nucléaire, par exemple dans les cellules chaudes ou les boîtes à gants.
CORTEX va permettre d’intégrer rapidement toutes les fonctions nécessaires à une télémanipulation efficace, en facilitant le développement d’un contrôleur temps réel dur, couvrant l’ensemble de la mission :