Fruit d’années d’expertise des équipes robotiques du CEA-List en téléopération, cobotique et robotique collaborative, l’environnement SCORE, complément naturel à CORTEX, facilite le développement d’interface de programmation et de commande supervisée robotique.
SCORE, pour Supervisory COntrol framework for Robotic interfacE, est un environnement logiciel mis au point par les experts du CEA List en robotique, pour faciliter le développement d’interface de programmation et de commande supervisée de robots.
Il est un complément naturel à la suite logicielle CORTEX (qui facilite, elle, le développement des contrôleurs).
Conçu à l’origine pour répondre aux besoins de commande et de supervision de robots d’intervention en milieu hostile, SCORE a depuis évolué vers le manufacturing avancé en proposant des fonctionnalités innovantes améliorant de manière significative les systèmes cobotiques et de robotique collaborative.

SCORE améliore fortement tout système robotique (de télé-opération, de cobotique, de robotique collaborative), en répondant aux enjeux suivants :
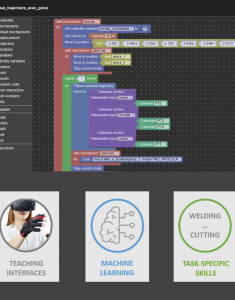
SCORE se distingue des approches usuelles de programmation robotique, basées programmation hors ligne (PHL) en permettant une interaction permanente en ligne avec le contrôleur robotique, offrant ainsi des fonctionnalités de contrôle-commande robotique interactives s’appuyant sur un jumeau numérique synchronisé en temps-réel avec l’environnement robotisé.
Le jumeau numérique de SCORE implémente :
Le modèle physique de SCORE s’appuie sur l’environnement logiciel de simulation multi-physique interactive XDE.
En développement constant pour répondre aux besoins en perpétuelle évolution du manufacturing avancé, SCORE doit intégrer de nouvelles fonctionnalités de programmation en ligne avancée, garantissant une plus grande flexibilité de mise en œuvre et d’usage des systèmes robotiques, et facilitant l’accès aux moyens robotiques au personnel non roboticien.

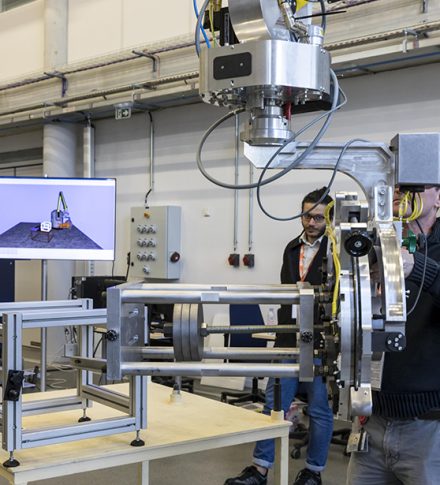
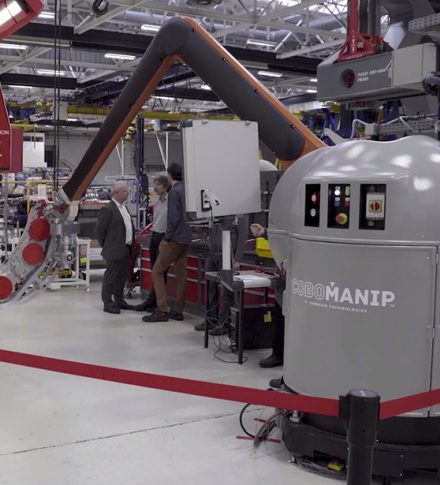
Le montage d’objets lourds est un problème récurrent dans beaucoup d’industries. Il est souvent fait à la main, occasionnant pénibilité et risques d’accidents, ou au pont, ce qui n’est jamais facile et très long.
Couplé par ici à Cobomanip, un cobot de port de charges, Score permet de guider l’opérateur dans le montage, en particulier lorsque les marges sont étroites. Programmer des zones d’anticollision va permettre d’éviter d’endommager la pièce à monter ou son environnement et des guides virtuels vont permettre de diminuer le nombre de degrés de liberté à gérer par l’opérateur en orientant et en positionnant précisément la pièce dans la zone de travail.