

Le choix de l’actionneur est l’un des principaux verrous technologiques pour l’adoption à grande échelle des dispositifs haptiques, en particulier pour les systèmes portés tels que les gants haptiques appliqués à la réalité virtuelle. La recherche aujourd’hui est très active et s’emploie à trouver une alternative au traditionnel moteur électrique, trop encombrant. Dispositifs pneumatiques, électrostatiques ou magnétorhéologiques ont fait leur apparition dans la littérature. Ils ont comme particularité d’être des actionneurs passifs (c’est-à-dire des freins). Ils se distinguent par une grande densité d’énergie permettant de faire des systèmes puissants et compacts. La contrepartie est qu’ils ne peuvent que s’opposer au mouvement de l’utilisateur, mais cela couvre déjà une grande partie des interactions utiles en pratique.
Dans ce contexte, le CEA-List étudie depuis une dizaine d’années le principe de la lubrification active et a conçu un actionneur intégré complet ouvrant la voie à un nouveau type de frein applicable à un large éventail d’applications.
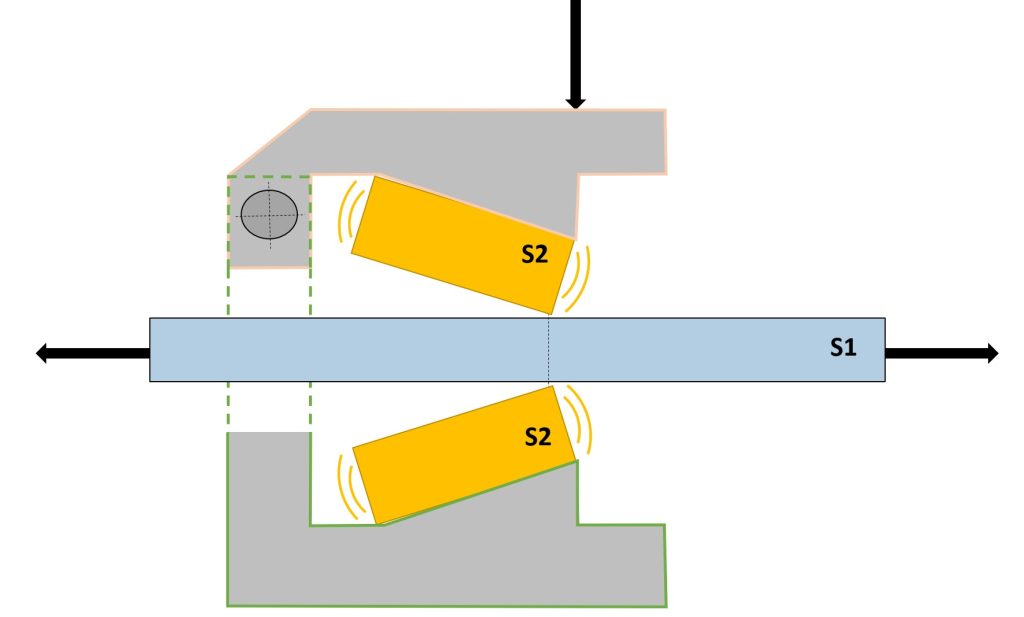
Le principe est simple (voir figure 1) : une pièce mobile, typiquement une plaque en verre, est prise en étau entre deux actionneurs piézo-électriques. Lorsqu’ils sont excités à leur fréquence de résonance par un signal électrique, la pièce se libère. Il est alors possible de contrôler la force ressentie par un utilisateur déplaçant cette pièce en modulant l’amplitude du signal d’excitation. Cette modulation peut être très rapide, jusqu’à 200Hz voire plus. Ainsi, cet actionneur est capable de rendre un effort depuis le domaine kinesthésique jusqu’au domaine tactile. Il est du reste possible de découpler les deux domaines et de contrôler indépendamment la force et la texture ressenties.
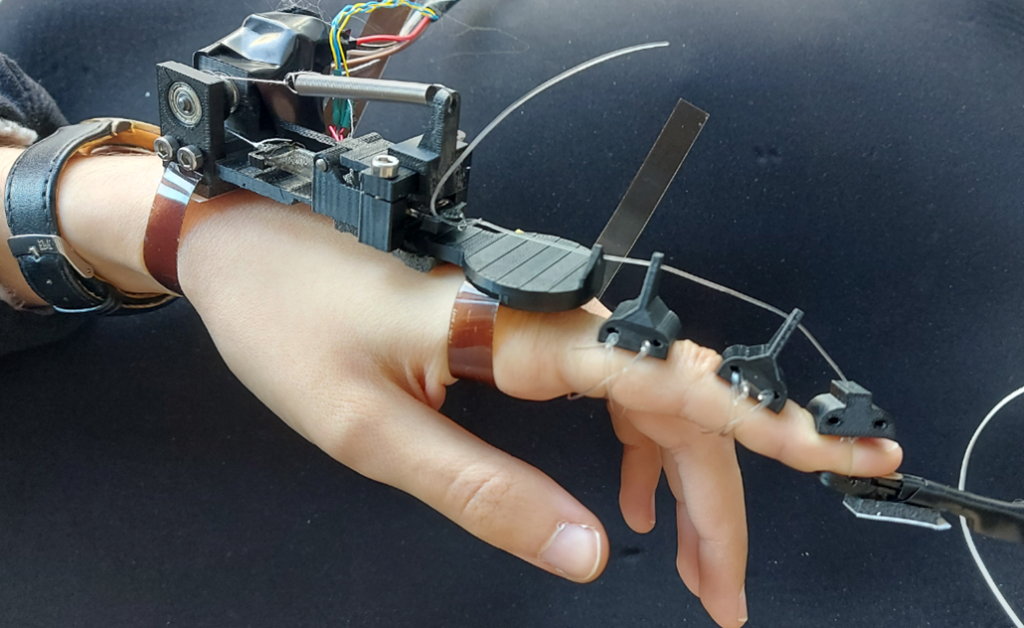
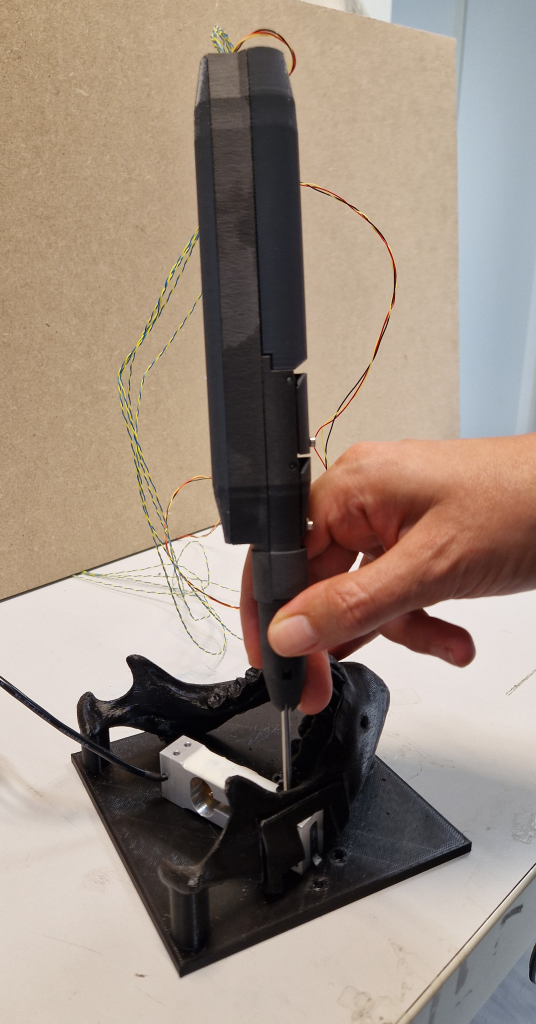
La conception et l’étude de ce frein a été le sujet des travaux de thèse de Marion Pontreau, dans le cadre du projet ANR WAVY, à l’issue desquels elle a obtenu le résultat remarquable d’une réduction de la force de frottement de plus de 90%, démontrant ainsi la pertinence de cette approche pour les applications haptiques. L’actionneur développé a été appliqué à différentes interfaces : intégré au gant haptique WAVY (voir illustration), il a permis de rendre les efforts et les textures de serrage (« Best Demo Award » à la conférence IEEE VR 2025). Il a également été utilisé pour la conception d’une fraiseuse chirurgicale destinée à la formation au geste en simulation d’une section de segment osseux (figure 2), travaux qui ont obtenu le prix « Best Student Paper » à la conférence World Haptics 2025.
c’est la réduction typique des forces de frottement obtenue à l’aide de la lubrification active.
Deux déposés et un troisième en cours de rédaction :