


Créer des robots interactifs et intelligents au service des humains.
Lire la suite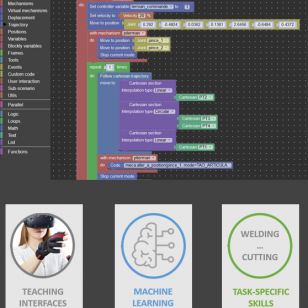
CORTEX: développement facilité de contrôleurs robotiques.
Lire la suite

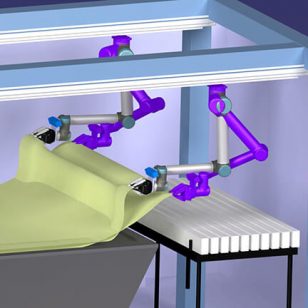
La création de robots intelligents repose sur des développements conjoints et coordonnés en mécatronique, contrôle-commande, informatique et péri-robotique.
Lire la suite


Le CEA-List, expert en systèmes numériques intelligents, rejoint le 𝗦𝗣𝗥𝗜𝗡𝗚 𝟭𝟮𝟬 le 2 juin 2026.
Lire la suite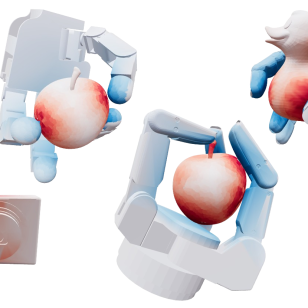
La préhension robotique exige un contrôle précis du positionnement des effecteurs (bout des doigts ou phalanges) sur l’objet saisi, étudié le cas pratique où les seules informations disponibles sont le nuage de points 3D du préhenseur, généré par capteurs visuels, simulations ou réseaux neuronaux génératifs.
Lire la suite
Le CEA-List a développé une interface cognitive basée sur des ontologies pour offrir un outil de programmation contextuelle de robot sans compétences robotiques préalables.
Lire la suite