L’un des enjeux de la robotique intelligente est de doter les futurs robots de fonctionnalités avancées de perception et d’action. L’objectif est de les rendre capables de réaliser des tâches complexes très variées dans des environnements changeants faisant cohabiter et collaborer humains et robots. Les recherches du CEA-List suivent une approche systémique pour aboutir à une plateforme performante, évolutive et sûre, apte à répondre à ce besoin.
Pour améliorer la performance des systèmes robotiques, le CEA-List mène des développements conjoints et coordonnés en mécatronique, vision, intelligence artificielle, interfaces homme-machine et réseaux de communications, avec un périmètre couvrant à la fois les robots et des fonctions péri-robotiques. Pour permettre l’intégration de l’ensemble de ces technologies, il développe un Axe de recherche Architectures et logiciels.
En parallèle, l’Institut poursuit des travaux théoriques et expérimentaux visant à accroître les performances et la stabilité de la commande de ces systèmes robotiques devenus de plus en plus complexes.
Ces développements mettent en œuvre des approches classiques, exploitant les modèles des robots, ou des approches plus innovantes, issues du monde de l’intelligence artificielle et du machine learning, basées sur l’utilisation des données acquises sur site. Les recherches sont effectuées directement sur les robots ou à travers leurs jumeaux numériques.

Un robot est constitué de différents composants fortement intégrés :
Les recherches du CEA-List ont comme objectif d’améliorer les performances individuelles de ces différents composants en termes de vitesse, polyvalence, précision, efficacité énergétique, etc.
Elles visent aussi à optimiser leur intégration dans la structure du robot pour augmenter les performances globales du système. Et cela, pour différents types de robots : fixes ou mobiles, isolés ou groupés en équipes et travaillant de façon coordonnée, interagissant ou non avec des humains.
Les robots intelligents ont vocation à évoluer dans leur environnement pour y exécuter des tâches très variées.
Le CEA-List développe des capteurs innovants (vision, mouvement, proximité, contact, force…) intégrés aux robots et/ou à leur environnement immédiat, et des algorithmes et systèmes de traitement de l’information performants exploitant des méthodes issues du monde du traitement du signal ou de l’intelligence artificielle, pour leur permettre de décrypter le milieu dans lequel ils évoluent : en mesurer les paramètres et les changements, interpréter ces mesures et réagir en conséquence.
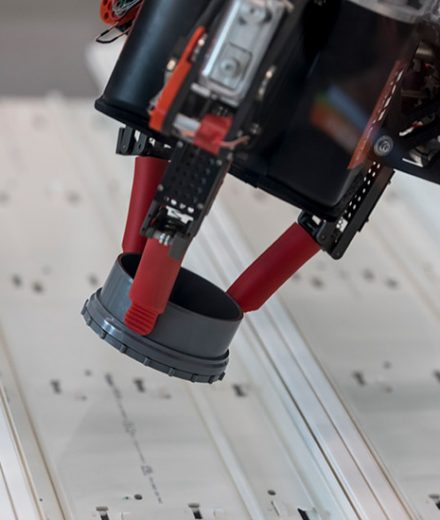
Les recherches visent également à donner aux robots la capacité d’agir efficacement sur les objets d’intérêt : les saisir, les déplacer et les manipuler, à poste ou en mobilité, en autonomie ou avec des humains. Dans cette optique, le CEA-List conçoit et développe des préhenseurs innovants combinant, par exemple, différentes modalités de saisie, ou comportant plusieurs doigts capables de s’adapter aux objets saisis.
Il travaille aussi à la modélisation des interactions entre robots et objets saisis afin d’en améliorer la commande. Ses travaux portent également sur le développement de solutions de robotique mobile et d’assistance aux mouvements des opérateurs.
Parce qu’ils sont amenés à collaborer, humains et robots doivent interagir. Et cela, de manière efficace, naturelle, sûre et sécurisée.
Les recherches du CEA-List portent sur le développement de moyens d’interaction :
À titre d’exemple, le CEA-List cherche à équiper le Robot Compagnon de solutions de vision lui permettant de détecter l’arrivée d’un opérateur auquel il a fait appel et de reconnaître ses actions. Cela, de telle sorte qu’il puisse reprendre son travail de façon adéquate une fois l’opérateur reparti.
Le CEA-List développe également des solutions permettant au robot de traduire en instructions opérables des explications données en langage naturel.
La compréhension de l’environnement est un prérequis pour assurer l’autonomie d’un robot et pour développer ses capacités d’adaptation au contexte. La vision artificielle, technologie clé pour modéliser l’environnement dynamique du robot et composante majeure de l’Intelligence artificielle, portée par les progrès fulgurants du Machine Learning (apprentissage automatique), et en particulier des réseaux de neurones profonds, est une composante essentielle pour répondre à ce challenge.
Les recherches menées au CEA-List dans le domaine de l’Intelligence Artificielle visent en particulier à développer des fonctions de perception basée vision, respectant les contraintes de l’embarqué (frugalité, temps-réel) et de robustesse (confiance). Les fonctionnalités apportées au monde de la robotique sont la localisation du porteur (SLAM multimodal, asservissement visuel), la modélisation de l’environnement (reconstruction 3D, détection/localisation, suivi d’objets d’intérêt, contrôle qualité) et la compréhension du contexte (détection des personnes et reconnaissance des activités).
La vision s’intègre dans les processus de robotique pour des tâches de déplacements, d’actions sur l’environnement (inspection, saisie, usinage…) et d’interactions avec les humains. Elle est essentielle pour permettre au robot d’évoluer dans des environnements encombrés dans lesquels opèrent également des humains et pour assurer la qualité des tâches réalisées.
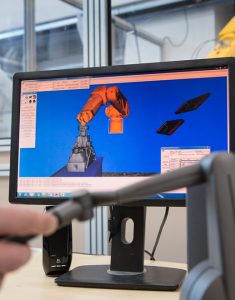
Le jumeau numérique est la reproduction numérique d’un système ou d’une installation physique. C’est une technologie essentielle pour optimiser les performances des différents composants d’un robot, pour faciliter l’intégration des robots dans leur environnement de travail, et pour optimiser leur fonctionnement.
En phase de conception, le jumeau numérique permet, en effet, de reproduire virtuellement les processus robotiques dans toute leur complexité. Cela, pour tester la robustesse du système et sa capacité à répondre au cahier des charges de la tâche réelle.
Une fois le système placé dans un environnement opérationnel, le jumeau numérique peut, par ailleurs, tourner en parallèle de ce dernier. Il offre alors un moyen efficace et agile pour ajuster divers paramètres en temps réel, comme le partage hommes/robots des tâches. Il facilite aussi la détection des écarts par rapport à un comportement de référence et la mise en place d’actions correctives en temps réel.
Enfin, on peut lui confier l’apprentissage de nouvelles tâches avant de transférer ces capacités aux robots opérant dans le monde réel. Ces développements autour de la simulation s’appuient sur les travaux du CEA-List dans les domaines des jumeaux numériques et de l’IA.
Essentielles au fonctionnement d’un robot, les technologies de communication apparaissent comme un volet important de la recherche en robotique.
Pour permettre des échanges efficaces entre les différents composants du robot et entre robots, le CEA-List travaille à l’intégration de technologies de communication en temps maîtrisé (time sensitive networking).
Les aspects de cybersécurité sont également pris en compte (voir la page Axe de recherche Architectures et logiciels), notamment pour protéger les communications entre les robots et des composants déportés dans le cloud, susceptibles de s’établir par réseau sans fil.