Les développements robotiques du CEA-List se sont appuyés pendant environ 20 ans sur la plateforme TAO (Téléopération Assistée par Ordinateur). TAO est un outil mature, utilisé dans divers contextes industriels, mais qui souffre d’une conception monolithique rendant les évolutions fonctionnelles difficiles et coûteuses, notamment pour les applications robotiques sans rapport avec la téléopération. Sa prise en main est également complexe.
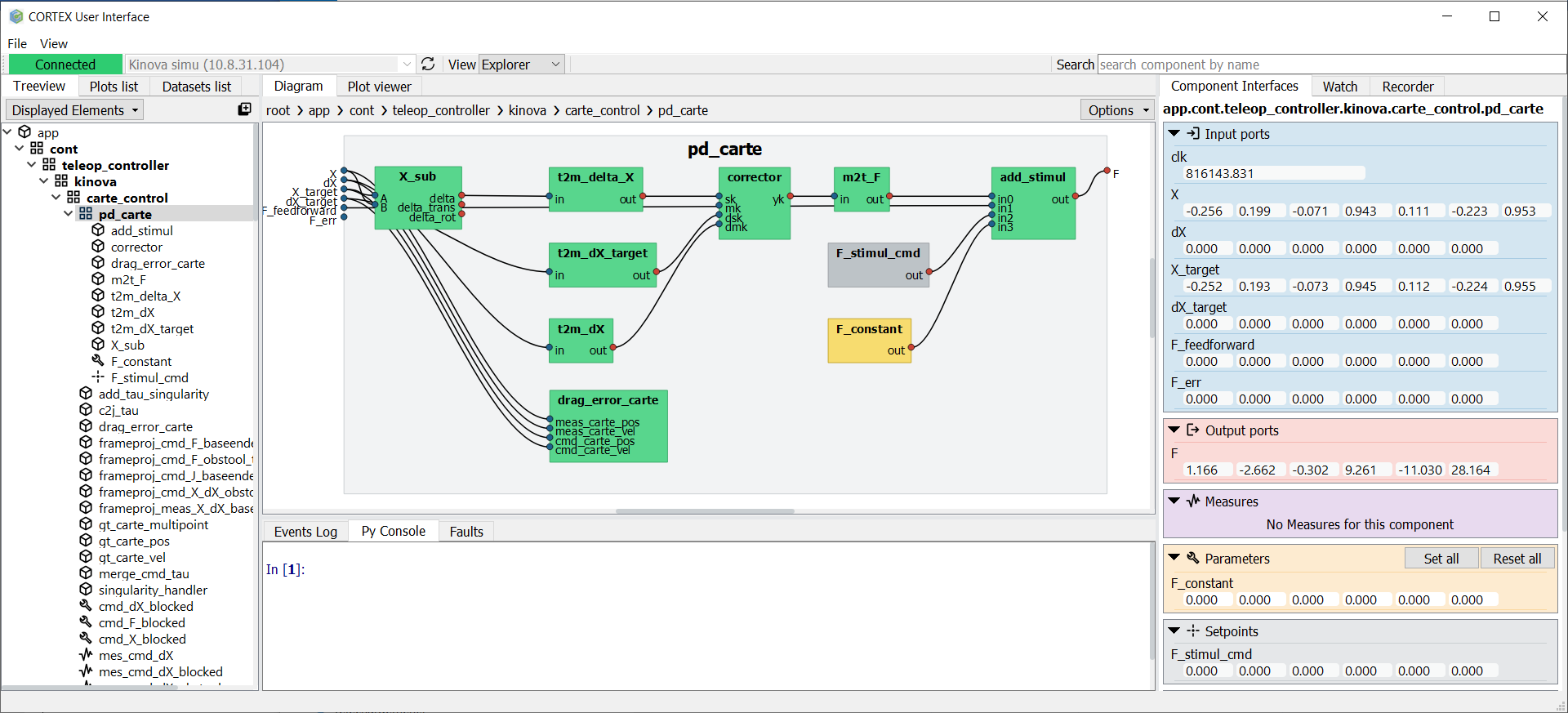
La suite logicielle CORTEX «Component Oriented Real-Time EXecution engine» propose une approche totalement différente, basée sur une conception générique orientée «composant », qui permet de structurer le contrôleur robotique sous forme de schéma-blocs. Cette approche améliore sensiblement la lisibilité et la maintenabilité du logiciel, mais également sa modularité, puisque tout composant peut être capitalisé et réutilisé dans différents cas d’usage.
CORTEX n’est pas le seul framework robotique à s’appuyer sur la notion de composant, mais il se démarque de ses prédécesseurs tels que OROCOS et RT-MAPS par plusieurs avantages fondamentaux, qui le rendent plus apte à un usage industriel. D’une part, CORTEX permet une bien meilleure gestion de la complexité, grâce à des notions telles que les conteneurs (macro-composants qui permettent de réaliser des schémas à plusieurs niveaux) et la gestion de modes, qui permet de formaliser chaque mode de fonctionnement du robot par un schéma-bloc indépendant, et de changer de mode en temps réel. D’autre part, car CORTEX est une suite logicielle complète intégrant toutes les fonctionnalités et outils nécessaires à la mise au point, à l’exploitation et à la maintenance des contrôleurs robotiques.
CORTEX se démarque également du framework ROS, largement utilisé dans la communauté robotique, par un positionnement différent. ROS est un middleware conçu pour faciliter l’interconnexion d’équipements robotiques et de logiciels métiers, tandis que CORTEX est conçu pour réaliser des applications temps réel robustes et performantes. CORTEX est interconnectable avec ROS, ce qui garantit une grande compatibilité avec de nombreux outils tiers.

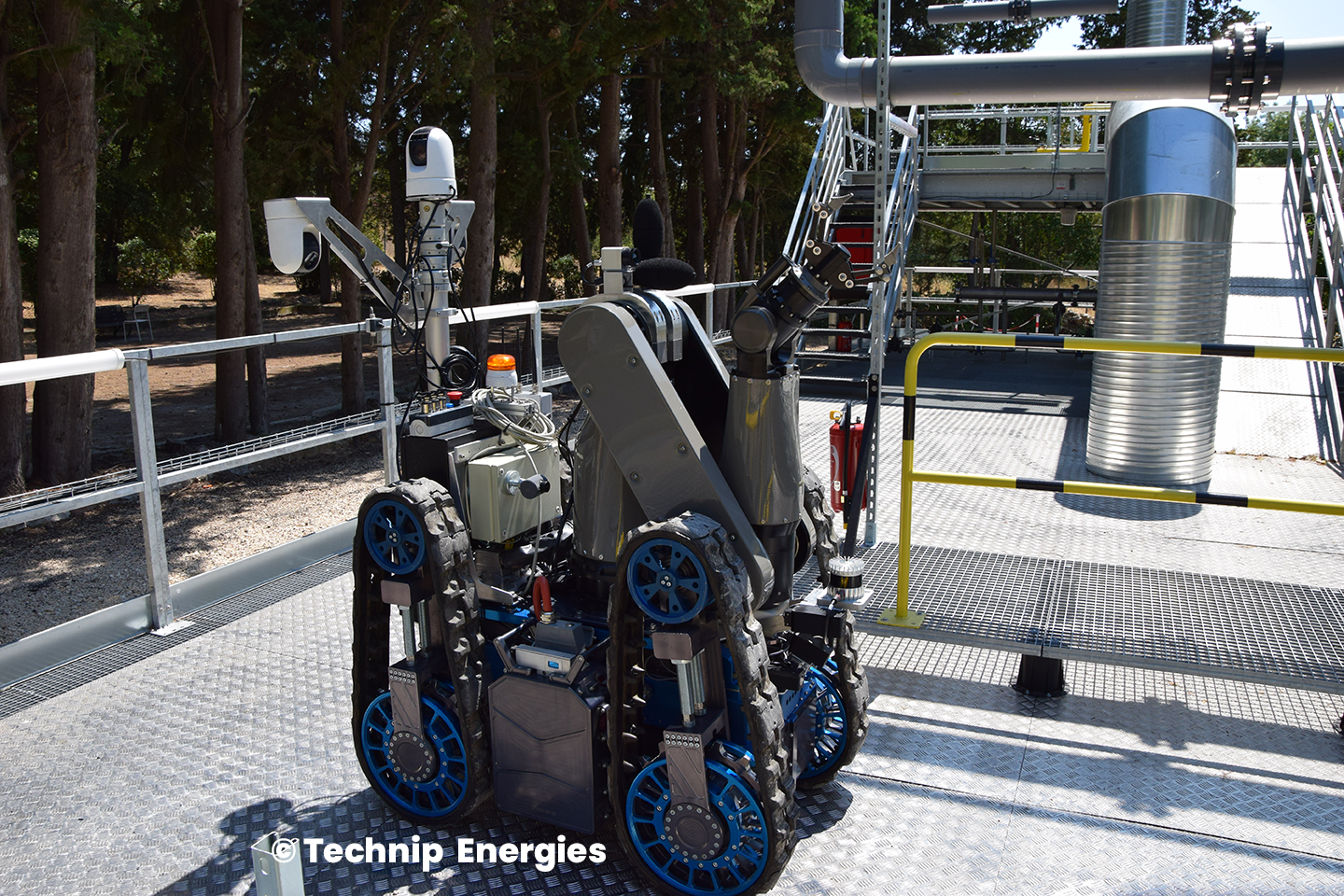
CORTEX est utilisé dans la quasi totalité de nos applications robotiques. Son transfert industriel est en cours auprès de plusieurs partenaires, dont Orano (traitement des déchets nucléaires), KUKA Systems (manufacturing), et Cybernetix, société du groupe Technip Energies (inspection & maintenance). Pour chacun, des projets d’industrialisation ont permis de développer des contrôleurs CORTEX à haut niveau de maturité (TRL 7/8), adaptés aux spécificités de chaque application, et de les valider en conditions réelles.
CORTEX fait l’objet d’un brevet. La diffusion de la version industrielle 1.0 est prévue en 2024, en synchronisation avec le premier accord de licence d’exploitation.