

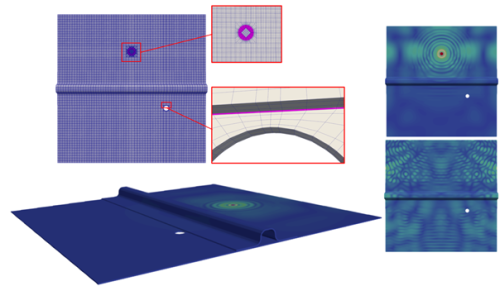
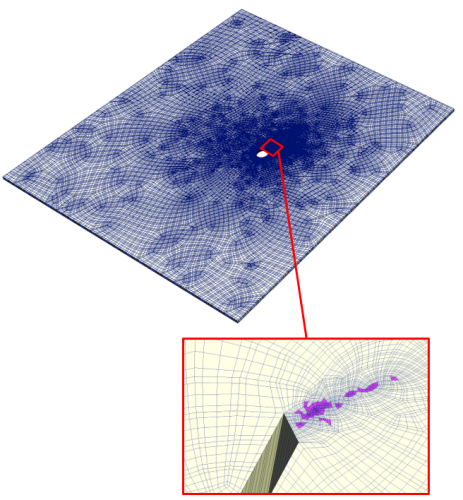
Pour la simulation de la propagation d’ondes visco-élastiques appliquées au contrôle non destructif (CND), la présence d’inclusions à très forts contrastes, de couches minces, ou d’éléments de maillage fortement déformés génère des difficultés dans les algorithmes standards de discrétisation en temps. Celles-ci imposent à ces algorithmes une contrainte très forte sur le pas de temps maximal autorisé assurant un calcul numérique correct. Cette contrainte est notamment liée au rayon spectral d’opérateurs de rigidité définis dans la zone « perturbée », et conduit à des pas de temps extrêmement faibles et à un coût de calcul disproportionné.
Le travail présenté ici propose, et analyse, deux familles de stratégies numériques permettant de découpler la stabilité globale de l’algorithme de discrétisation en temps de la raideur locale, dans la zone « perturbée ».
Premièrement, nous étendons aux modèles visco-élastiques les schémas localement implicites (LI), formulés en appliquant un schéma implicite uniquement pour les opérateurs locaux. Nous sommes capables de prouver la stabilité de l’algorithme final, par une méthode d’énergie, indépendamment des opérateurs restreints à la zone « perturbée ». Ce résultat est démontré pour les trois modèles de visco-élasticité les plus employés en CND : Maxwell, Zener et Kelvin-Voigt. La stabilité reste gouvernée uniquement par le domaine de fond, ce qui représente une amélioration significative par rapport au schéma explicite de référence.
Deuxièmement, nous étendons aux modèles visco-élastiques la procédure de stabilisation des schémas explicites, couplée à une méthode de décomposition de domaine.
Dans la zone « perturbée », le terme raide est remplacé par un polynôme de Chebyshev de stabilisation dont l’ordre permet d’augmenter le pas de temps admissible de manière proportionnelle. Cette méthode reste explicite en pratique, tout en nécessitant uniquement une résolution locale à l’interface. Les preuves de décroissance d’énergie établissent une condition de stabilité améliorée et contrôlable.
Ces stratégies sont ensuite évaluées en situation réaliste, dans des configurations 2D et 3D représentatives de contrôles ultrasonores dans des matériaux hétérogènes.
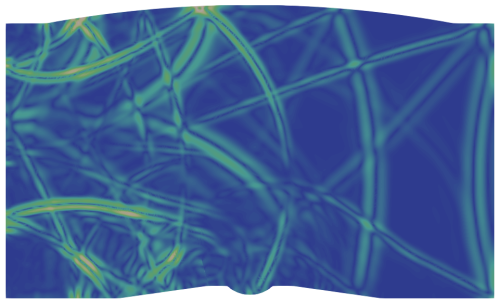
Les résultats montrent des gains significatifs en pas de temps, en nombre d’itérations et en coût CPU. Dans certains cas, la réduction du temps de calcul atteint un ordre de grandeur tout en reproduisant fidèlement les phénomènes d’atténuation et de réflexion multiple recherchés dans les matériaux micro-structurés.
Temps de calcul un ordre de grandeur inférieur aux approches standards sur la simulation de certaines configurations 2D/3D de contrôle ultrasonore.
Nous montrons qu’il est possible de contourner les limitations de certains algorithmes numériques utilisés dans la plateforme CIVA en présence de zones géométriques et/ou de matériaux complexes.
Les méthodes déployées représentent une extension importante des techniques de discrétisation en temps évoluées pour les modèles de propagation d’ondes visco-élastiques.