

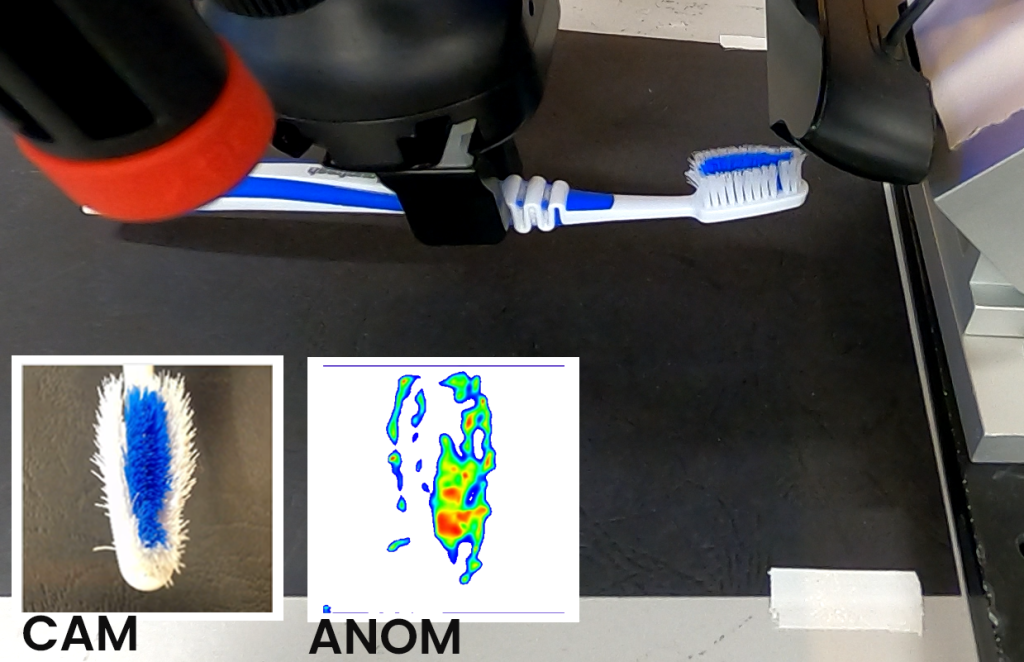
Notre partenariat avec Siemens sur la vision pour la robotique a pour objectif d’améliorer la compréhension de l’environnement et les actions d’un robot. Les recherches adressent un large spectre de cas d’usage industriels (robotique manufacturière et agricole, tri des déchets, démantèlement d’installations…) qui requièrent adaptabilité, précision et temps de cycles maîtrisés. Le couplage fin de la manipulation d’une pièce et de son contrôle visuel par l’IA est particulièrement intéressant pour optimiser la préhension et la présentation de l’objet devant une caméra, et ainsi repérer les défauts éventuels avec la plus grande fiabilité.
Trois technologies ont été développées :
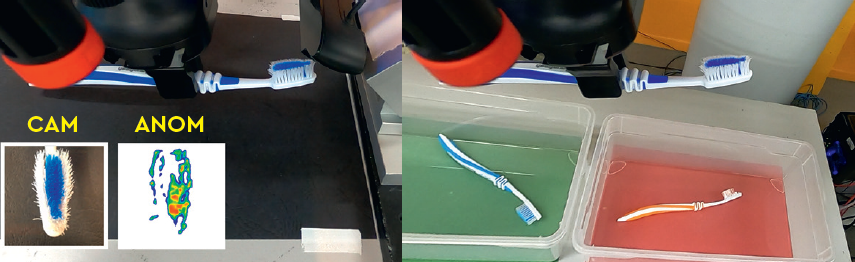
L’intégration des technologies a été réalisée grâce au logiciel Phosphor du CEA-List, et a été testée avec succès sur plusieurs scénarios d’inspection d’objets. Les prochaines étapes de la collaboration porteront sur l’extension des technologies à la manipulation fine d’objets déformables avec des préhenseurs pluri-digitaux, et la généralisation à d’autres contextes applicatifs.
un partenariat de confiance avec Siemens
facteur de gain en frugalité des données d’apprentissage
Concevoir des systèmes robotiques intelligents force à imaginer de nouvelles solutions technologiques de perception

