


Depuis plusieurs années, le CEA-List travaille sur la conception et la commande de préhenseurs dextres pour diverses applications industrielles. L’objectif est d’automatiser des tâches nécessitant la dextérité des deux mains humaines, notamment dans des environnements non structurés. Ce défi scientifique répond à des enjeux sociétaux essentiels, tels que l’amélioration des conditions de travail et la réduction de la pénibilité.
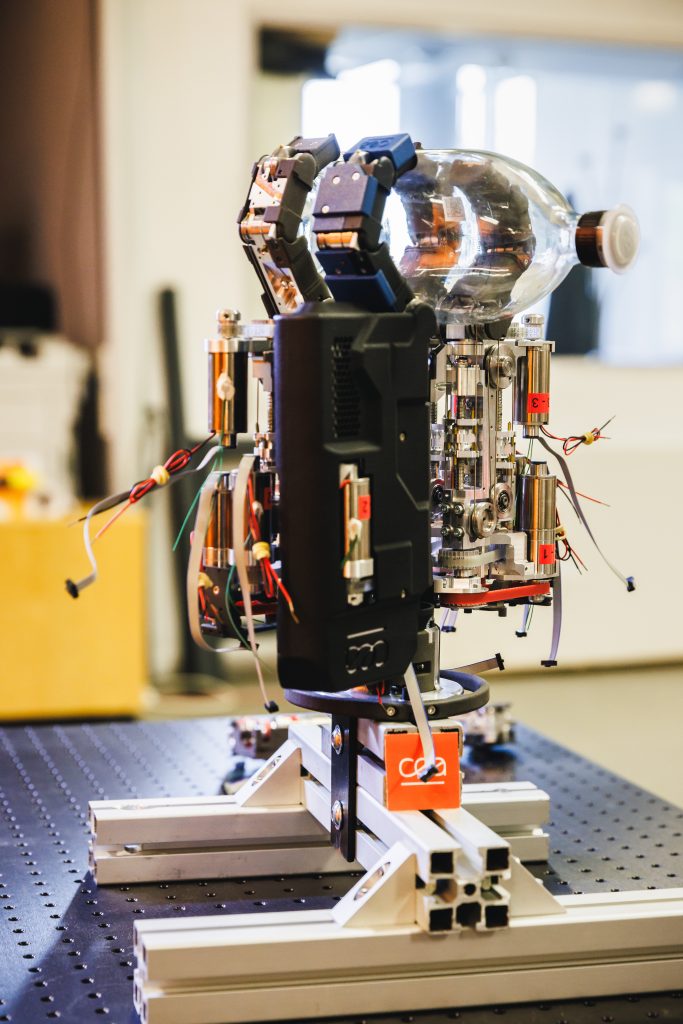
Le système développé a été validé dans le cadre du projet européen H2020 Tracebot au regard de ses performances en contexte de manipulation bimanuelle, démontrant une efficacité similaire au travail manuel. Il comprend des préhenseurs pluridigitaux reconfigurables, chacun constitué de 4 doigts à 3 phalanges, équipés de capteurs tactiles hybrides piézoélectriques/piézo-résistifs.
Cela offre 18 degrés de liberté, dont 14 sont actionnés. Le CEA-List a conçu les préhenseurs et leur commande, les capteurs tactiles provenant du CEA-Leti.
La perception multimodale combine des informations kinesthésiques, tactiles et visuelles. Les capteurs tactiles détectent des événements critiques comme les glissements d’objets, l’insertion et l’assemblage. Des algorithmes d’apprentissage supervisé classifient ces événements, permettant une interaction plus sûre et plus efficace avec l’environnement.
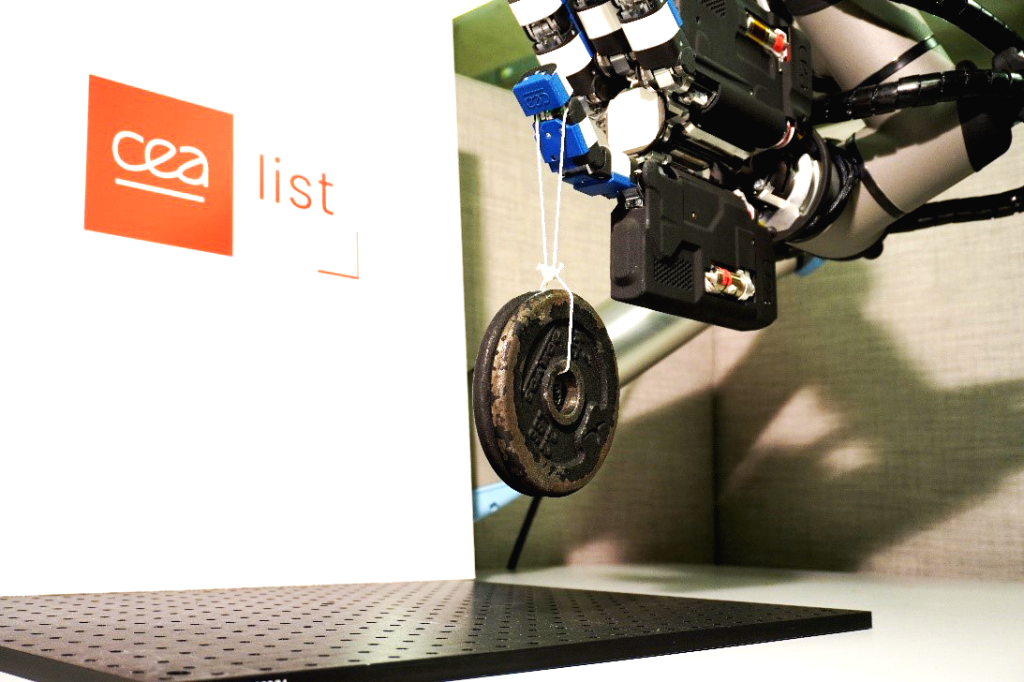
La manipulation dextre est au cœur du développement, avec une capacité à effectuer des mouvements précis et adaptables. Grâce à des actionneurs à hautes performances et faibles frottements, le système peut réaliser 80 prises différentes, attestant de sa flexibilité et de sa capacité à manipuler une grande variété d’objets. Le contrôleur assure un pilotage précis en position et en effort, contribuant à une automatisation plus intelligente et moins contraignante pour les travailleurs. L’association de ces technologies offre un potentiel important pour la transformation des secteurs comme la fabrication, la logistique et la santé, en réduisant la charge de travail physique et en améliorant la qualité des produits. Elle ouvre également la voie à des applications dans des domaines où la manipulation précise est cruciale, comme la robotique médicale et l’assistance aux personnes âgées.
Dans le cadre du projet européen H2020 Tracebot, le CEA a développé une station de manipulation bimanuelle composée de deux préhenseurs équipant des bras collaboratifs. Cette station a été intégrée dans un démonstrateur chez ASTECH, un partenaire du projet. Les performances du système ont été validées dans un contexte réel – des tâches de manipulation de matériel médical – visant un enjeu actuel majeur : la production automatique de kits stériles.
Les prochaines étapes techniques incluent le développement de stratégies de planification pour la manipulation robotique bimanuelle, notamment via l’apprentissage par renforcement. Le transfert technologique de composants HW & SW est prévu dans le cadre d’un partenariat avec la société FINRIP.
L’avènement de cette génération de préhenseurs pluridigitaux ouvre la voie à l’automatisation de tâches qui demeuraient jusqu’alors manuelles en raison de leur complexité.
La perception multimodale d’un système de préhension favorise sa capacité à interagir finement avec son environnement.


