Dans le domaine robotique, pour adresser les contraintes de sécurité, la programmation ou la définition de tâches de planification et de reconfiguration, les systèmes d’IA existants nécessitent une haute expertise et ne sont efficaces que dans leur périmètre dédié.
L’IA symbolique repose sur l’automatisation du raisonnement logique à partir de connaissances formalisées et offre ainsi des garanties d’explicabilité. Elle est en particulier utilisée pour la planification en robotique car elle permet de définir une séquence d’actions sûres et prévisibles à partir d’une situation initiale, jusqu’à l’objectif souhaité. Cependant, si la rigueur de l’IA symbolique est bien adaptée au raisonnement logique, elle n’est pas efficace sur les données de type image, texte ou langage naturel, qui sont trop imprécises.
De son côté, l’IA générative, qui s’appuie sur les grands modèles de langage (LLMs), encode de très grandes quantités d’informations avec une forte capacité d’adaptation. Elle sait interpréter des images ou des commandes en langage naturel, exploiter des connaissances implicites ou du « bon sens », facilitant l’interaction fluide entre l’humain et le robot. En revanche, ses réponses manquent de garantie et de traçabilité et son apprentissage nécessite une grande quantité de données.
Utilisées séparément, chaque approche est insuffisante pour résoudre les défis robotiques tels que la compréhension d’un environnement imprévisible. Mais, ensemble, elles peuvent apporter rigueur et flexibilité, raisonnement logique et puissance d’apprentissage.
C’est cette approche hybride que nous avons proposée dans le cadre du projet Magicoders, en s’appuyant sur notre expertise en ingénierie logicielle, en IA, en robotique et en calcul intensif.
Magicoders s’inscrit dans une démarche multidisciplinaire, à la croisée de l’ingénierie des exigences, de la planification automatique, de l’intelligence artificielle générative et de la robotique. L’approche hybride adoptée permet l’émergence de propriétés nouvelles, telles qu’une meilleure adaptabilité du raisonnement aux contextes complexes ou ambigus, au service d’une IA explicable, intégrée et opérationnelle.
Nous avons expérimenté l’intégration de l’IA symbolique et de l’IA générative (LLMs – Large Language Models) pour la planification en robotique en nous basant sur PDDL (Planning Domain Description Language), un standard de description de planification robotique.
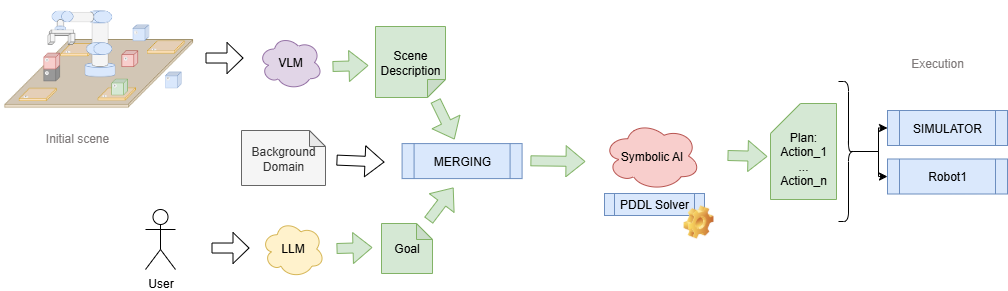
L’approche Magicoders repose sur le flux suivant :
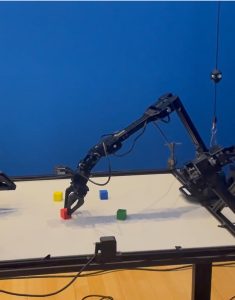
L’approche a été testée dans deux cas d’usage, un simulateur et un bras robotique, qui ont bien atteint l’objectif attendu tout en respectant les règles métier. La faisabilité de l’approche de planification hybride est ainsi démontrée.
Ces recherches s’inscrivent dans une logique d’approche modulaire et de bout en bout, avec l’ambition de proposer des pistes pour les architectures futures combinant raisonnement symbolique, LLMs et systèmes autonomes.
Les prochaines étapes sont ambitieuses : elles incluent une compréhension avancée de la scène, la revue et la correction automatique et guidée d’un plan d’actions, une stratégie de récupération si le plan a échoué, la replanification et l’intégration des connaissances métier pour contrôler et contextualiser les réponses du LLM.
Nous continuons à explorer ces pistes, afin de développer des systèmes robotiques avancés fondés sur l’IA générative pour résoudre des problèmes de manipulation complexes.