

La dextérité de la main humaine est une source d’inspiration ancienne. Dans les années 2000, les préhenseurs robotiques parvenaient largement à exécuter des tâches simples et répétitives mais peu variées dans le domaine de l’industrie manufacturière. Puis, leur usage a commencé à se diversifier pour des tâches plus complexes et/ou dans le but d’assister les humains. Cependant, ces nouveaux usages soulèvent un point crucial : le préhenseur doit pouvoir manier les objets tout en finesse et délicatesse pour effectuer des opérations toujours plus minutieuses.
C’est désormais possible avec Abilis, développé par le CEA-List dans le cadre du projet européen Tracebot (Traceable Robotic Handling Of Sterile Medical Products, H2020-EU.2.1.1. INDUSTRIAL LEADERSHIP programme (grant agreement No 101017089), 2021-2025), qui est doté de plusieurs fonctionnalités avancées dont le sens du toucher.
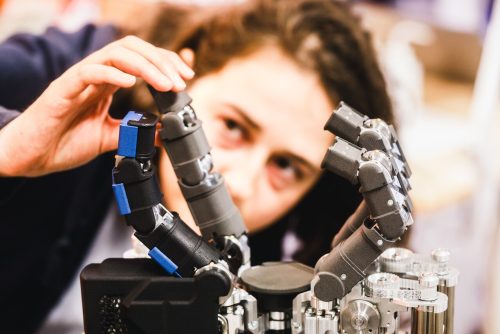
Comment ? Grâce à 14 actuateurs (actionneurs) qui mesurent l’effort qu’ils exercent sur un objet et à 13 capteurs tactiles, trois pour chacun des quatre doigts et un sur la paume, exploitant une technologie hybride développée par le CEA-Leti. Les capteurs tactiles permettent de connaître précisément la localisation des points de contact grâce à une première couche piézorésistive. Combinée à l’intégration d’algorithmes à base de réseaux de neurones, les doigts Abilis sont capables de déterminer des événements critiques comme un glissement : ils ont été entraînés à en reconnaître le signal haute fréquence.
Abilis est destiné à la préhension versatile : il peut saisir des objets aux formes et aux tailles variées en adaptant la configuration de sa prise et en conservant sa précision sur de petits objets. Le contrôle en effort et sa sensibilité permet à Abilis de s’adapter naturellement à de nouveaux objets et sa grande dextérité lui permet de les manipuler avec un ou plusieurs doigts et la paume.
Autre capacité distinctive, sa puissance : il allie ses 18 degrés de liberté à une force de serrage exceptionnelle -20 N applicables au niveau de la phalange- ce qui lui permet de soulever des masses de 2 kg avec un seul doigt.

Les premiers usages du préhenseur Abilis sont ceux du projet Tracebot, c’est à dire la manipulation à deux mains de matériel médical. L’utilisation de la robotique dans la production de produits médicaux stériles pourrait réduire leurs coûts et accélérer leur production en garantissant une traçabilité stricte.
Après ces premiers essais, le potentiel d’usage de ce préhenseur et de la station bimanuelle est très important et le CEA-List va poursuivre la valorisation de cette technologie. Les prochaines étapes techniques sont en particulier :