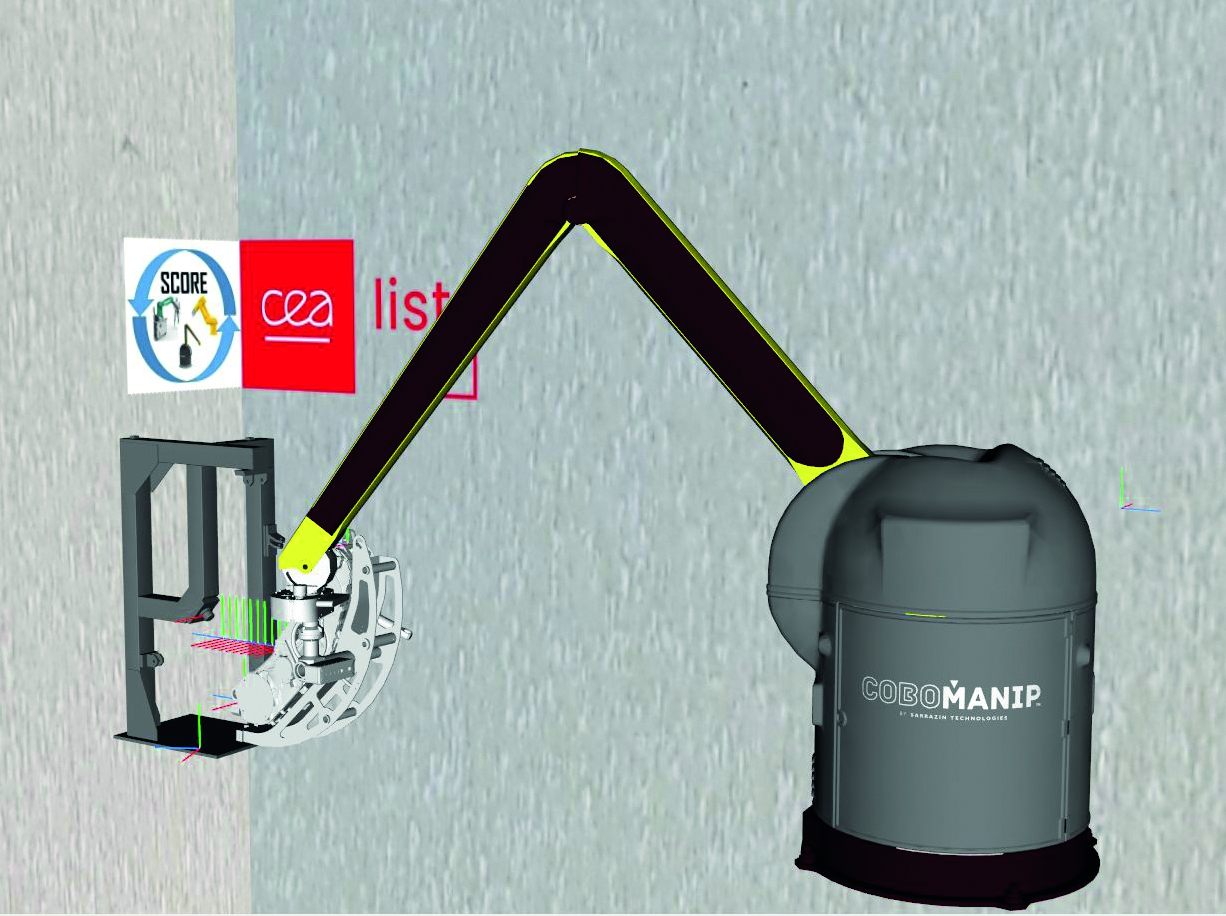
Issu de 10 années de recherches, Cobomanip est un cobot manipulateur intelligent à 4 degrés de liberté et 125 kg de charge utile. Il apporte une assistance à la manipulation en offrant des fonctionnalités innovantes, telles que l’anticollision active ou les guides virtuels, s’appuyant sur un jumeau numérique de l’environnement. Il permet un positionnement de très haute précision (dixième de millimètre) en assurant compensation de poids, guidage et anticollision, d’une pièce potentiellement très lourde.
Le Cobomanip est conçu sur une structure innovante permettant un équilibrage statique de la charge transportée, qui garantit un degré homogène d’assistance quelle que soit la position et une sécurité d’usage intrinsèque. Des actionneurs électriques à vis à billes et câbles de faible puissance viennent compléter cet équilibrage pour apporter les fonctions d’assistance à la manipulation par l’opérateur.
Enfin le contrôle commande, couplé en temps réel à un jumeau numérique, aide à sécuriser la manipulation en garantissant l’absence de collision avec l’environnement, et le guidage de la charge manipulée sur des trajectoires virtuelles, programmables directement par le compagnon ou en préparation du poste de travail.
De nombreuses tâches d’assemblage sont réalisées manuellement par les industriels du secteur aéronautique. Elles mobilisent plusieurs personnes et des moyens de levage des bâtiments. Elles induisent des risques HSE et limitent les performances de la production globale. Par ailleurs, les manipulateurs industriels ou des robots collaboratifs avec guidage manuel ne répondent pas correctement au besoin, du fait du manque de transparence et de fluidité, et ne sont pas adoptés par les compagnons.

Une démonstration de faisabilité de manipulation d’un panneau de voilure, à l’aide de Cobomanip, a été réalisée au sein d’une ligne de production d’un constructeur aéronautique partenaire. Trois manipulations représentatives ont été effectuées, par une quinzaine de compagnons. Ils ont restitué de multiples avantages de la technologie, dont :
Cobomanip est ainsi une solution cobotique sans équivalent sur le marché des manipulateurs par trois atouts clés :
et une réduction potentielle du nombre d’opérateurs.
Le CEA est engagé dans le développement de cobots performants qui, alliés à d’autres briques technologiques, comme les jumeaux numériques, constituent un vecteur de compétitivité et d’amélioration de la qualité de vie au travail. Cette nouvelle collaboration avec l’un des principaux acteurs mondiaux de la robotique répond parfaitement à notre ambition de participer au renforcement du tissu industriel français via Kuka Aerospace Systems France.
Le besoin de flexibilité et de précision rend difficile la robotisation de nombreuses tâches dans l’aéronautique ; Cobomanip accompagne la montée en cadence avec une manutention assistée précise et ergonomique.