Pour se déplacer en toute sûreté dans un parking également équipé de capteurs, le véhicule doit percevoir son environnement, ainsi que réconcilier des données mesurées depuis plusieurs points de vue, et enfin tenir compte de la disponibilité variable du réseau sans-fil.
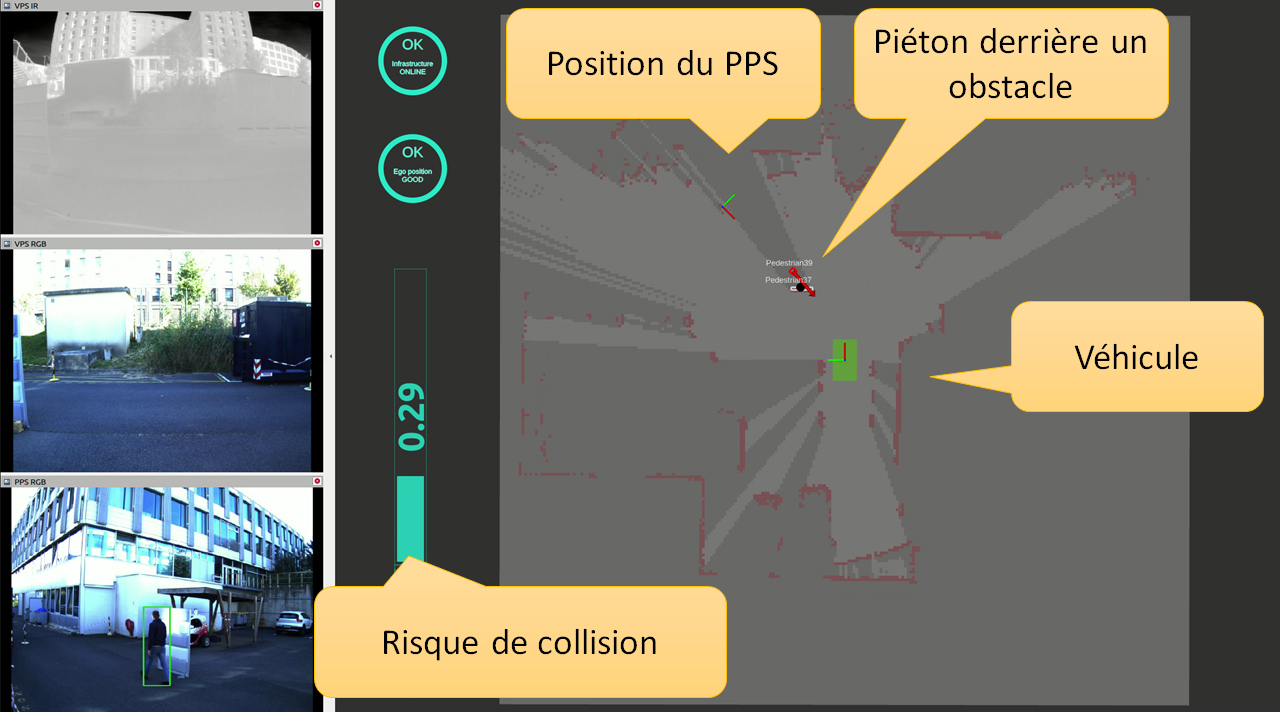
Pour détecter les obstacles (notamment les piétons) même dans la pénombre, un pipeline de traitement multi-capteurs (plateforme eMMOTEP) a été assemblé. Il exploite simultanément les images de caméras couleur et infrarouge, ainsi qu’un LIDAR multi-nappes, pour créer une carte d’occupation désignant tous les obstacles classifiés autour du véhicule, et prédire leur trajectoire (plateforme SigmaFusion).
Le parking, également pourvu de capteurs (caméras, LIDAR), calcule une carte des obstacles présents dans le parking : obstacles fixes (murs) et mobiles (piétons, véhicules…). Le véhicule doit réaligner cette carte avec la sienne propre, pour prendre en compte la position du véhicule dans le parking et apparier les obstacles détectés par les deux systèmes.
Entre le véhicule et le parking, la communication sans-fil (WiFi) est de qualité variable. Pour maintenir un temps de réaction prédictible, un dispositif de monitoring (plateforme Polygraph) mesure en permanence la qualité de communication. En cas de dégradation, ou de déconnexion, le véhicule bascule sur un mode dégradé, à vitesse plus réduite.
Ce prototype a été intégré sur la Twizy Carnauto du CEA-List ainsi qu’un mât de parking mobile, équipés de calculateurs embarqués NVidia, et démontré sur le parking extérieur de Nano-INNOV à Palaiseau.

La démonstration NeVeOS a été présentée aux CEA-List Tech Days (6-7 juin 2023), ainsi qu’à la Journée Outils Logiciels & Matériels pour la Recherche sur les Véhicules Terrestres Autonomes (ENS Paris-Saclay, 5 octobre 2023).
Intégrer sur véhicule les technologies de trois laboratoires est un vrai défi ; mais quelle fierté de présenter une démonstration qui fonctionne !