

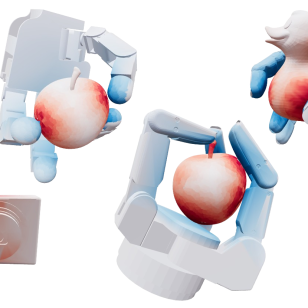
La préhension robotique exige un contrôle précis du positionnement des effecteurs (bout des doigts ou phalanges) sur l’objet saisi, étudié le cas pratique où les seules informations disponibles sont le nuage de points 3D du préhenseur, généré par capteurs visuels, simulations ou réseaux neuronaux génératifs.
Lire la suite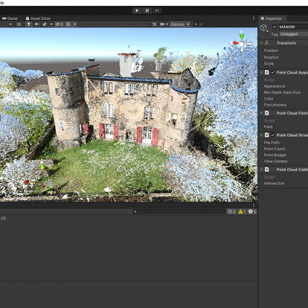
Avec l’émergence et la démocratisation des scanners 3D, outils d’acquisition et de numérisation tridimensionnels, de nouveaux défis scientifiques et techniques ont émergé : comment gérer la sauvegarde, la visualisation et le traitement de ces données massives, souvent plusieurs milliards de points (!), voire les coupler à la CAO ?
Lire la suite
La plateforme de simulation multi-physique interactive VIKI du CEA-List est dotée d’un parc d’équipements unique en France pour l’immersion et l’interaction en réalité virtuelle (VR) ou en réalité mixte/étendue (XR).
Lire la suite
Arcure et le CEA-List ont développé conjointement une caméra 3D embarquée capable de détecter les piétons à proximité des engins mobiles industriels pour éviter les risques de collision.
Lire la suite